94 CHA NGE PARA METERS
SPEED CONTROL 3
SPEED PI AD APTIO N 4
SPEED PI AD APTIO N 4
79)SPD ADAPT ENABLE
SPEED PI AD APTIO N 4
74)SPD ADPT LO BRPNT
SPEED PI AD APTIO N 4
78)INT % DURIN G RA MP
SPEED PI AD APTIO N 4
75)SPD ADPT HI BRPNT
SPEED PI AD APTIO N 4
76)LO BRPNT PRP G AIN
SPEED PI AD APTIO N 4
77)LO BRPNT INT T.C.
6.7.5 SPEED CONTROL / Speed integral time constant PIN 72
This should be matched with the mechanical time constant of the motor/load combination. Generally an
increased integral time will slo w the response.
6.7.6 SPEED CONTROL / Speed integral reset enable PIN 73
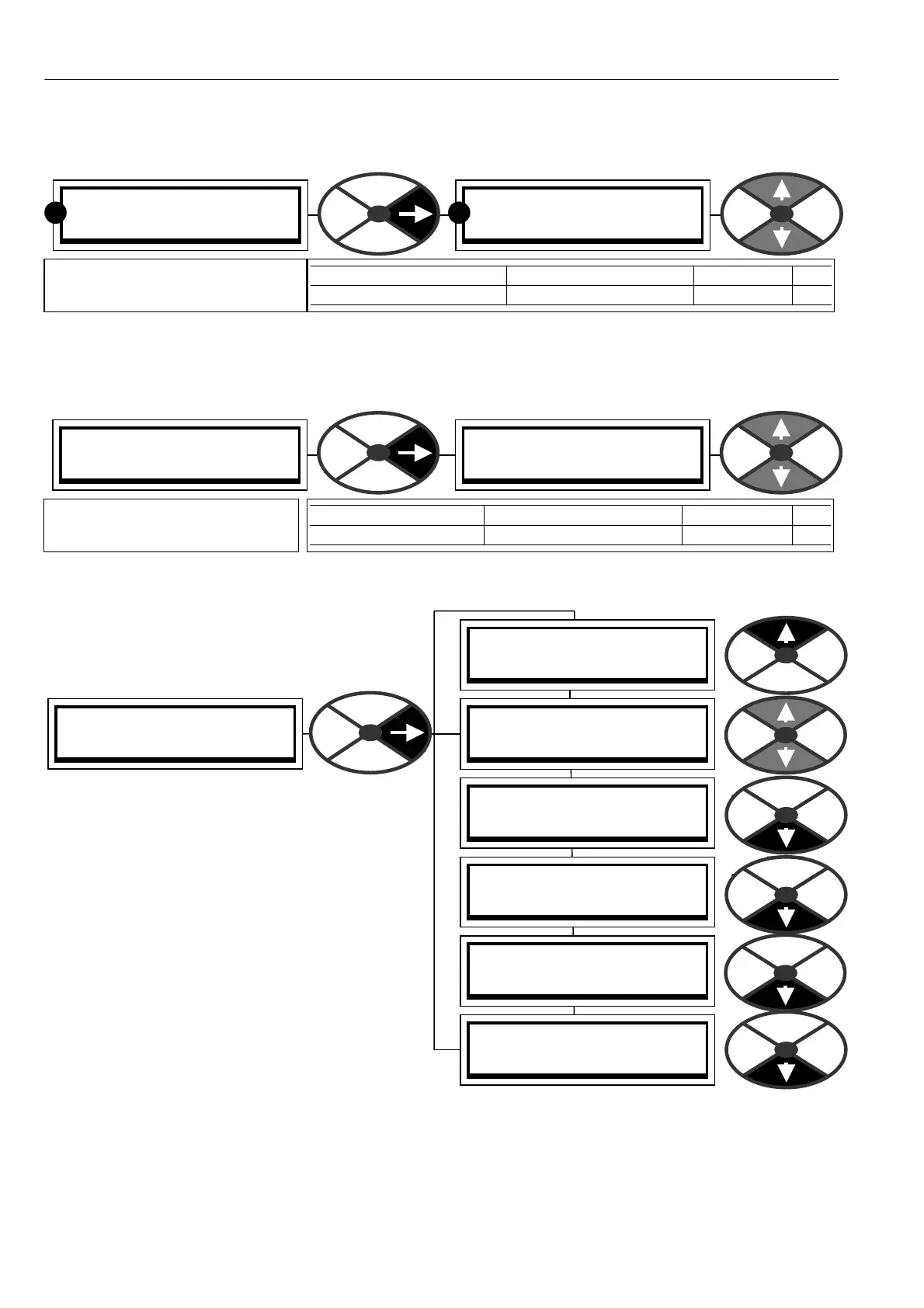
6.7.7 SPEED CONTROL / SPEED PI AD APTIO N
This menu allows sophisticated modification of the
speed loop error amplifier. It can provide modified
gains of the proportional and integral terms with
the gains changing linearly as the
speed error signal moves bet w een 2 break points.
79)SPD ADAPT ENABLE is used to activate the
function. The low break point is the starting level
for gain changing and the high break point is the
finishing level. Below the low break point the terms
are set by 76)LO W BRPT PRP G AIN and 77)LO W
BRPT INT T.C. in this sub-menu.
Above the high break point the terms are set by
71)SPEED PROP G AIN and 72)SPEED INT T.C. in
the previous menu.
The change is linear betw een the 2 sets of terms
as the actuating signal (speed error) traverses
bet ween the chosen break points. The break points
work symmetrically for each polarity of error.
There is also the ability to prevent the integrator from accumulating error during a long speed up ramp. This
can be useful for systems involving high inertias where there is a possibility of speed error at the top of the
ramp w hile the loop removes the integrator error. See 6.2.16 RUN M ODE RA MPS / Ramping flag PIN 35.
See 6.7.7.7 SPEED PI A D APTION / Using small speed inputs. The default gives lo w gain for small inputs.
SPEED CONTROL 3
72)SPEED INT T.C.
72)SPEED INT T.C.
1.000 SECS
PARA METER RANGE DEFAULT PIN
SPEED INT T.C. 0.001 to 30.000 secs 1.000 secs 72
Sets the integral time constant
of the speed loop error amplifier.
R R
SPEED CONTROL 3
73)SPEED INT RESET
73)SPEED INT RESET
DISABLED
PARA METER RANGE DEF AULT PIN
SPEED INT RESET EN ABLED OR DISABLED DIS ABLED 73
The integral reset can be
enabled leaving prop only.