Chapter 12 Description of Parameter Settings
MH300
Settings
Functions Descriptions
53
Trigger CANopen
Quick Stop
When this function is enabled under CANopen control, it changes
to Quick Stop. Refer to Chapter 15 CANopen Overview for more
details.
56
LOCAL / REMOTE
selection
Use Pr.00-29 to select LOCAL / REMOTE mode (refer to Pr.00-
29). When Pr.00-29 is not set to 0, the optional digital keypad
KPC-CC01 displays the LOC / REM status.
70
Force auxiliary
frequency to return to 0
Forces the auxiliary frequency to return to 0 when using this
function. PID keeps operating if PID is the master frequency.
When Pr.00-35 ≠ 0, the master frequency is enabled, and then
selecting this function with the terminal effectively forces the
auxiliary frequency to return to 0.
71
Disable PID function,
force PID output to
return to 0
When the master and auxiliary frequencies are enabled and
when using the PID function, ON: PID does not operate, returns
the integral value to 0, and forces the PID output to return to 0.
72
Disable PID function,
retain the output value
before disabled
When the master and auxiliary frequency are enabled, and the
PID function is enabled, and the terminal contact of this
parameter is ON, then PID does not operate, and its output
value remains the same as the value before it was disabled.
73
Force PID integral gain
to return to 0, disable
integral
ON: PID continues to operate, disable the integral control, and
return the integral value to 0.
74 PID feedback reversed
ON: PID negative feedback becomes positive feedback, or PID
positive feedback becomes negative feedback.
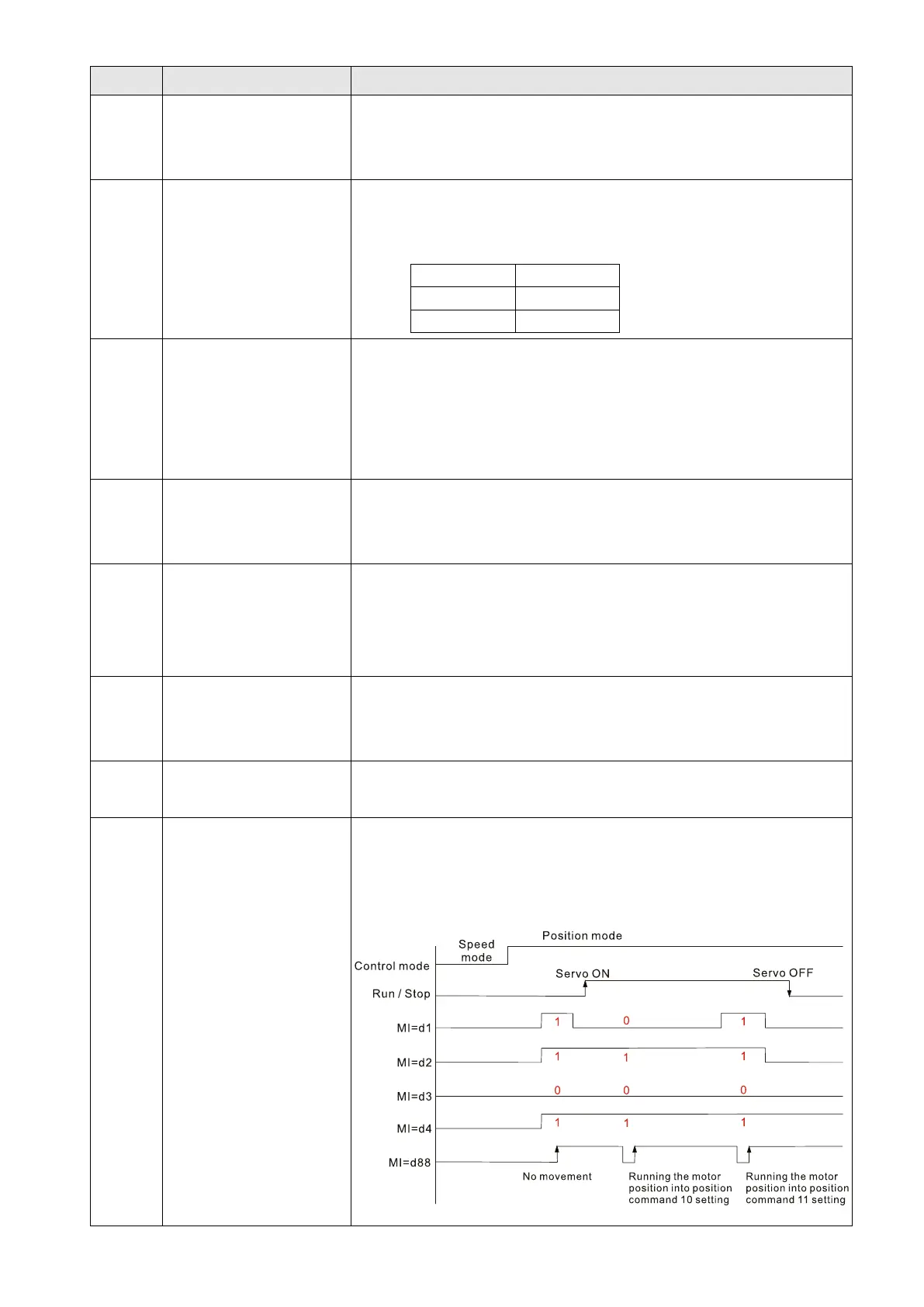
78
Multi-step position
command confirm
When the terminal is active and the drive is in Servo ON status
under the position control mode (Pr.00-10=1), t
the corresponding P2P positions according to MI1–
status, and the motor moves to that corresponding position.

 Loading...
Loading...




