Chapter 12 Description of Parameter Settings
MH300
Multi-function Output Direction
Default: 0000h
Settings 0000h–FFFFh (0: N.O.; 1: N.C.)
This parameter is in hexadecimal.
This parameter is set by a bit. If the bit is 1, the corresponding multi-function output acts in an
opposite way.
Example:
Assume Pr.02-13 = 1 (indication when the drive is operating). If the output is positive, the bit is
set to 0, and then Relay is ON when the drive runs and is OFF when the drive stops. On the
contrary, if the output is negative, and the bit is set to 1, then the Relay is OFF when the drive
runs and is ON when the drive stops.
bit 4 bit 3 bit 2 bit 1 bit 0
MO2 MO1 Reserved Reserved RY
Terminal Counting Value Reached (returns to 0)
Default: 0
Settings 0–65500
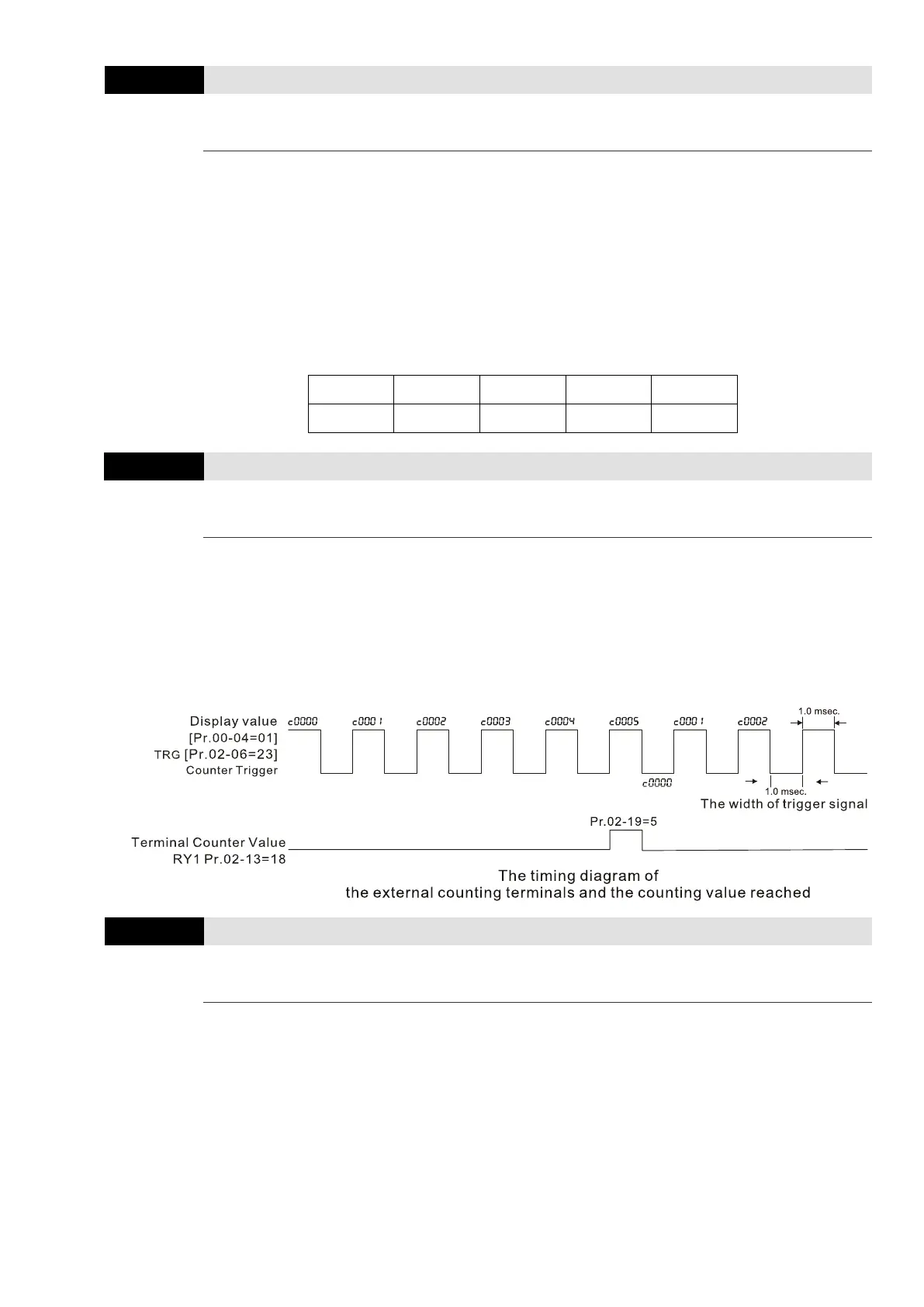
The counting function is enabled when Pr.02-19 ≠ 0.
You can set the input point for the counter using the multi-function terminal MI6 as a trigger
terminal (set Pr.02-06 to 23). When counting is completed, the specified multi-function output
terminal is activated [Pr.02-13, Pr.02-16, Pr.02-17, or Pr.02-36–Pr.02-38 (with extension card) is
set to 18]. Pr.02-19 cannot be set to 0 at this time.
The timing diagram below show that when counting to 5, RY1 activates and displays 0.
Preliminary Counting Value Reached (does not return to 0)
Default: 0
Settings 0–65500
Use this parameter with Pr.02-19.
When the count value counts from 1 to reach this value, the corresponding multi-function output
terminal is activated [Pr.02-13, Pr.02-16, Pr.02-17, or Pr.02-36–Pr.02-38 (with extension card) is
set to 17], and keeps counting to the last count value.
You can use this parameter as the end of counting to make the drive run from the low speed to
stop.
The timing diagram is RY1 activates when the count value is three, and the display returns to
zero when counts to five:

 Loading...
Loading...




