Chapter 12 Description of Parameter Settings
MH300
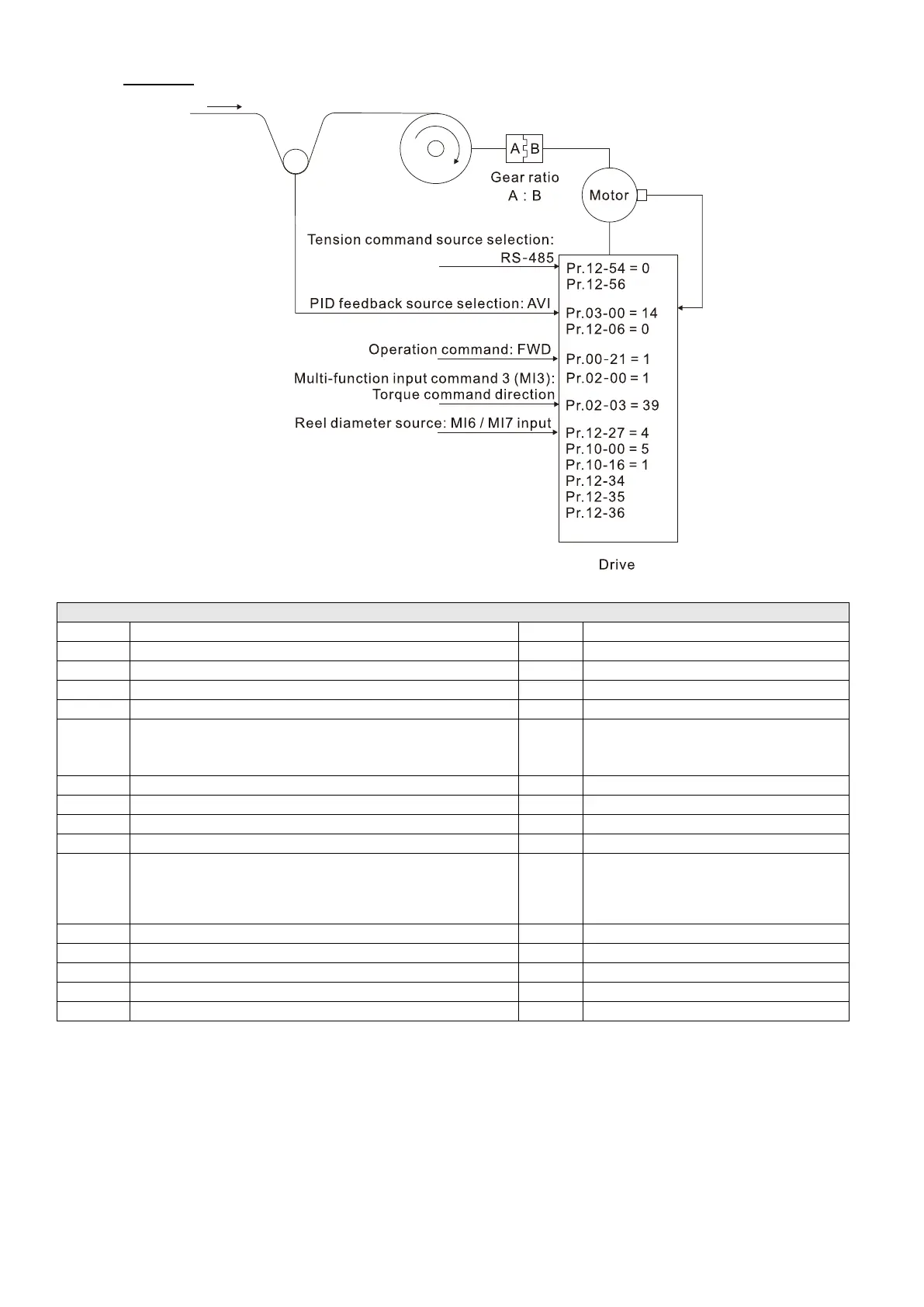
Example:
A summary of the parameters – Tension closed-loop, torque mode
Operation command source (AUTO, REMOTE)
Operates by using external terminals
Multi-function input command 3 (MI3)
AVI analog input selection
Tension PID feedback signal
10-16 Pulse input type setting 1
Phases A and B are pulse inputs,
forward direction if A-phase leads B-
Tension control selection
Closed-loop tension, torque mode
Mechanical gear A at load side
Depends on working condition
Mechanical gear B at motor side
Depends on working condition
PID feedback source selection
12-27 Reel diameter source 4
4: Calculated via thickness integral, the
encoder installed at reel side inputs
Depends on working condition
Depends on working condition
Depends on working condition
Tension command source selection
RS-485 communication input
Tension command setting value
Depends on working condition

 Loading...
Loading...




