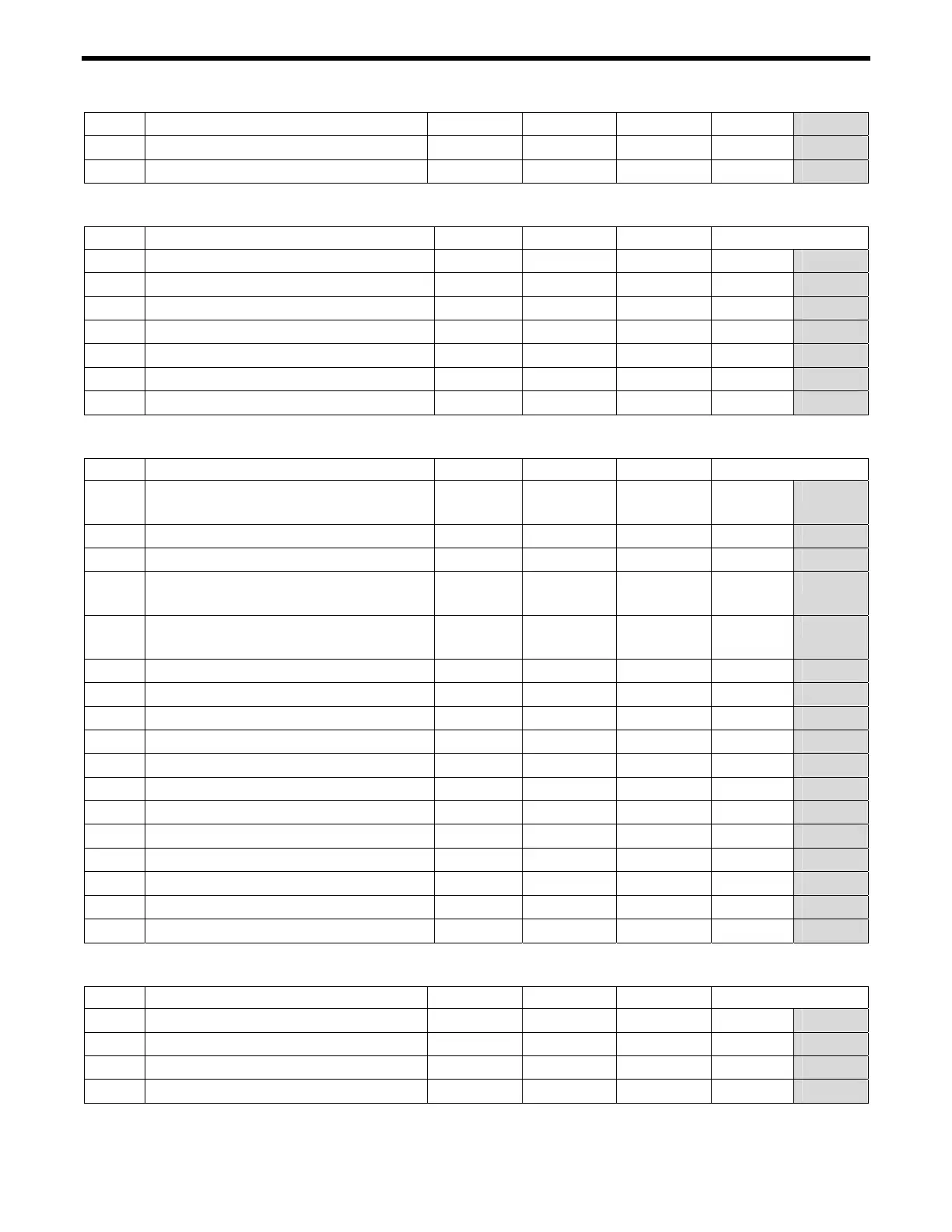
VA
Set velocity
♦ ♦ ♦
3-
148
VB
Set base velocity for step motors
♦ ♦ ♦
3- 149
VU
Set maximum speed
♦ ♦ ♦
3-
152
FLOW CONTROL & SEQUENCING
Cmd. Description IMM PGM MIP Page
DL
Define label
♦
3-
50
JL
Jump to label
♦ ♦
3-
89
RQ
Generate service request
♦ ♦ ♦
3-
122
SA
Set device address
♦ ♦ ♦
3-
125
WP
Wait for absolute position crossing
♦ ♦ ♦
3-
153
WS
Wait for stop
♦ ♦ ♦
3-
154
WT
Wait for time
♦ ♦ ♦
3-
155
I/O FUNCTIONS
Cmd. Description IMM PGM MIP Page
BG
Assign DIO bits to execute stored
programs
♦
♦
3-
31
BK
Assign DIO bits to inhibit motion
♦ ♦ ♦
3-
32
BL
Enable DIO bits to inhibit motion
♦ ♦ ♦
3-
33
BM
Assign DIO bits to notify motion
status
♦ ♦ ♦
3-
34
BN
Enable DIO bits to notify motion
status
♦ ♦ ♦
3-
35
BO
Set DIO Port Direction
♦ ♦ ♦
3-
36
BP
Assign DIO for jog mode
♦ ♦ ♦
3-
38
BQ
Enable/disable DIO jog mode
♦ ♦ ♦
3-
39
DC
Setup data acquisition
♦
♦
3-
43
DD
Get data acquisition done status
♦
♦
3-
45
DE
Enable/disable data acquisition
♦
♦
3-
46
DF
Get data acquisition sample count
♦
♦
3-
47
DG
Get acquisition data
♦
♦
3-
48
ES
Define event action command string
♦
♦
3- 56
SB
Set DIO state
♦ ♦ ♦
3-
126
UL
Wait for DIO bit low
♦
3- 147
UH
Wait for DIO bit high
♦
3-
146
GROUP FUNCTIONS
Cmd. Description IMM PGM MIP Page
HA
Set group acceleration
♦ ♦ ♦
3- 63
HB
Read list of groups assigned
♦
♦
3-
65
HC
Move group along an arc
♦ ♦ ♦
3-
66
HD
Set group deceleration
♦ ♦ ♦
3-
68
3-12 Section 3 – Remote Mode

 Loading...
Loading...








