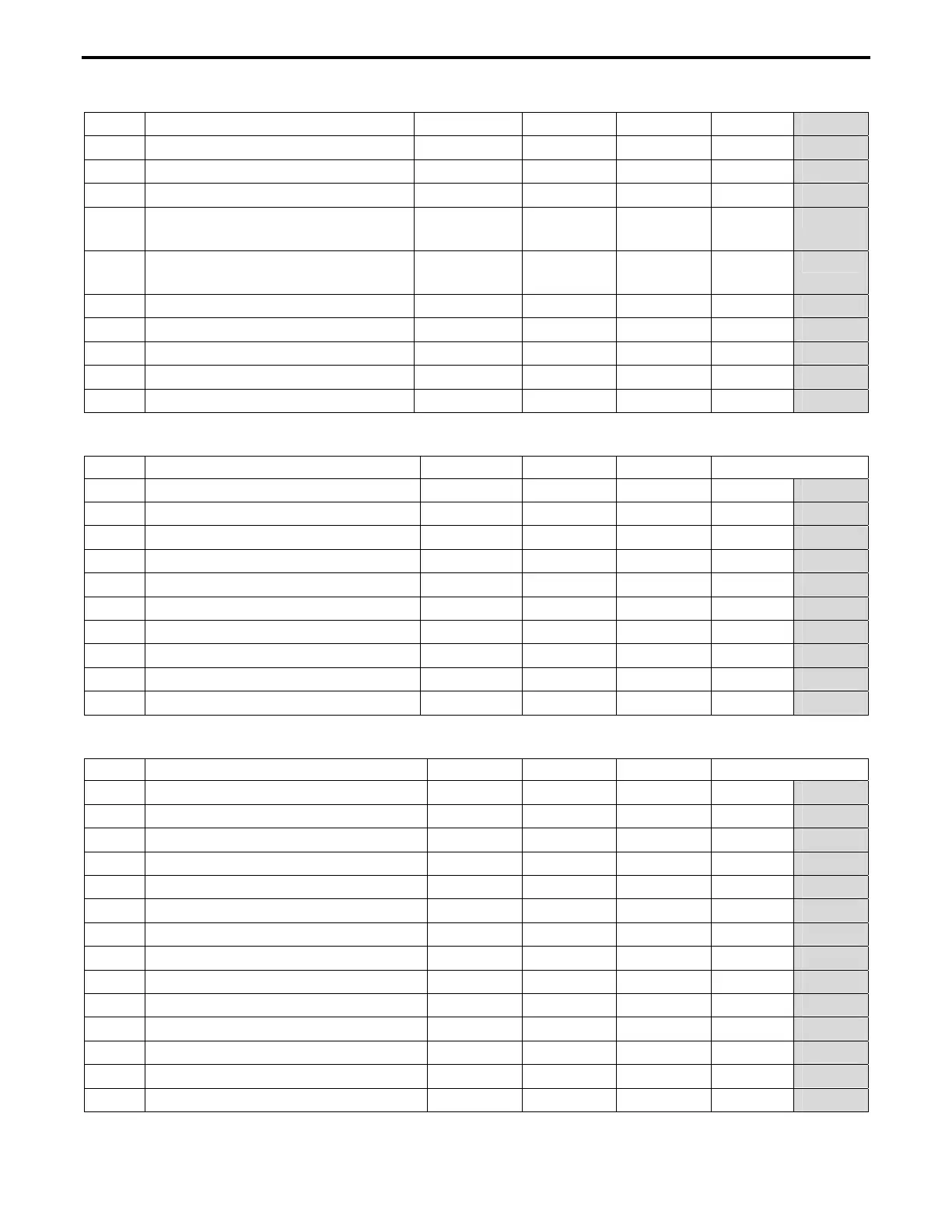
QR
Torque reduction
♦ ♦ ♦
3-
118
QS
Set microstep factor
♦ ♦
3- 119
QT
Define tachometer constant
♦ ♦
3-
120
QV
Set motor voltage
♦ ♦
3-
121
SI
Set master-slave jog update
interval
♦ ♦ ♦
3- 129
SK
Set slave axis jog velocity
coefficients
♦ ♦ ♦
3-
130
SL
Set left limit
♦ ♦ ♦
3-
131
SN
Set units
♦ ♦
3- 133
SR
Set right limit
♦ ♦
3-
134
SS
Set master-slave relationship
♦ ♦
3-
135
SU
Set encoder resolution
♦ ♦
3-
137
PROGRAMMING
Cmd. Description IMM PGM MIP Page
DL Define label
♦
3-
50
EO
Automatic execution on power on
♦
♦
3-
54
EP
Enter program download mode
♦
3-
55
EX
Execute stored program
♦ ♦
3-
58
JL
Jump to label
♦ ♦
3-
89
LP
List program
♦
♦
3-
95
QP
Quit program mode
♦
3-
117
SM
Save to non-volatile memory
♦
3-
132
XM
Get available program memory
♦
♦
3-
156
XX
Delete a stored program
♦
♦
3-
157
TRAJECTORY DEFINITION
Cmd. Description IMM PGM MIP Page
AC
Set acceleration
♦ ♦ ♦
3-
21
AE
Set e-stop deceleration
♦ ♦ ♦
3- 23
AG
Set deceleration
♦ ♦ ♦
3-
26
AU
Set maximum acceleration
♦ ♦ ♦
3- 29
BA
Set backlash compensation
♦ ♦ ♦
3-
30
CO
Set linear compensation
♦ ♦ ♦
3- 41
JH
Set jog high speed
♦ ♦ ♦
3-
87
JK
Set jerk rate
♦ ♦ ♦
3-
88
JW
Set jog low speed
♦ ♦ ♦
3-
90
OL
Set home search low speed
♦ ♦ ♦
3-
104
OH
Set home search high speed
♦ ♦ ♦
3-
103
OM
Set home search mode
♦ ♦ ♦
3-
105
SH
Set home preset position
♦ ♦ ♦
3-
128
UF
Update filter parameters
♦ ♦ ♦
3-
145
Section 3 – Remote Mode 3-11

 Loading...
Loading...








