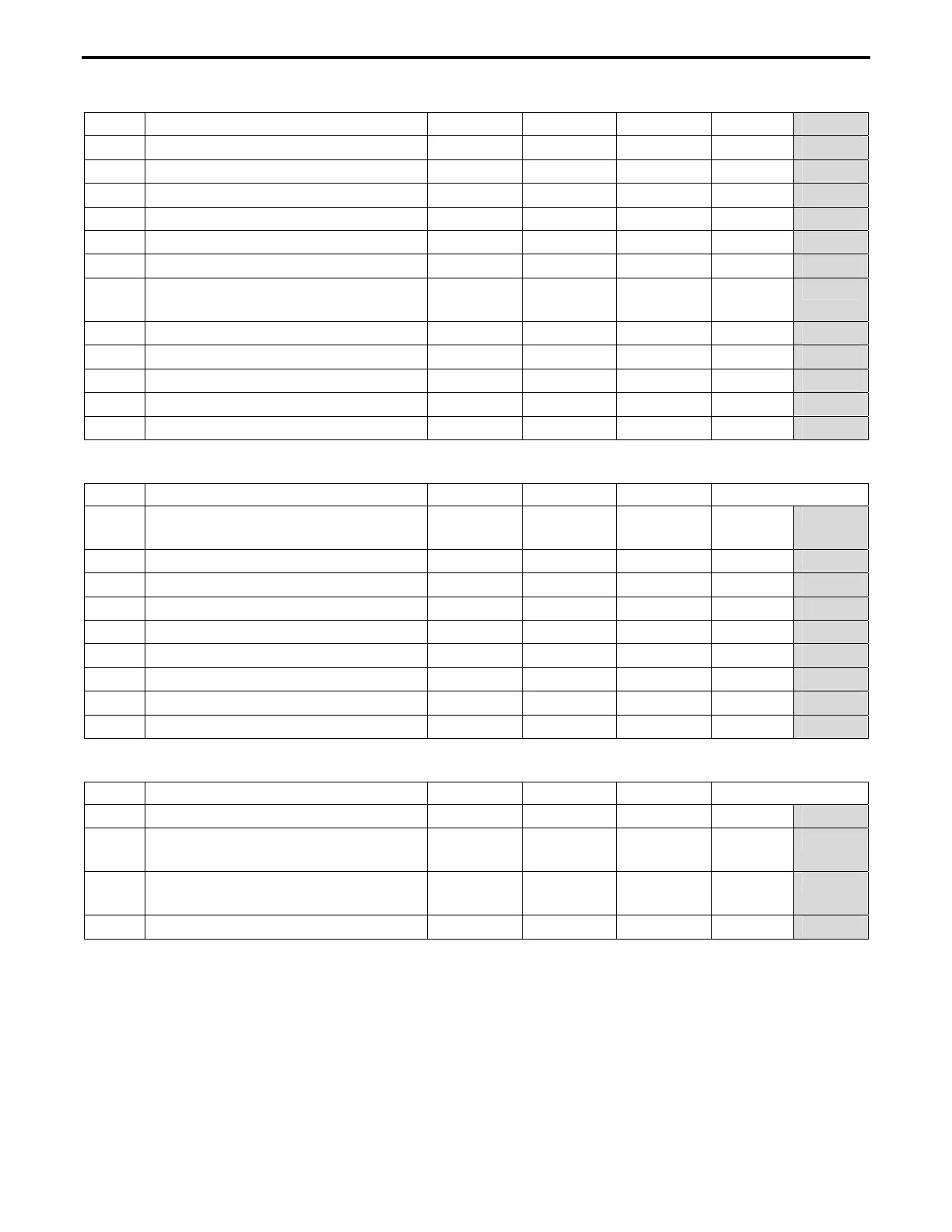
HE
Set group E-stop deceleration
♦ ♦ ♦
3-
70
HF
Group motor power OFF 3-
♦ ♦ ♦
71
HJ
Set group jerk
♦ ♦ ♦
3-
72
HL
Move group along a line
♦ ♦ ♦
3-
73
HN
Create new group
♦ ♦
3-
75
HO
Group motor power ON
♦ ♦ ♦
3-
77
HP
Get group position
♦ ♦
3-
78
HQ
3-
Wait for group via point buffer
near empty
♦ ♦ ♦
79
HS
Stop group motion
♦ ♦ ♦
3-
80
HV
Set group velocity
♦ ♦ ♦
3-
81
HW
Wait for group motion to stop
♦ ♦ ♦
3-
82
HX
Delete a group
♦ ♦ ♦
3-
84
HZ
Get group size
♦ ♦
3-
85
DIGITAL FILTERS
Cmd. Description IMM PGM MIP Page
AF
Acceleration/Deceleration feed-
forward gain
♦ ♦ ♦
3-
25
CL
Set closed loop update interval
♦ ♦ ♦
3-
40
DB
Set position deadband
♦ ♦ ♦
3-
42
KD
Set derivative gain Kd
♦ ♦ ♦
3-
91
Set integral gain Ki
♦ ♦ ♦
3-
92
KP
Set proportional gain Kp
♦ ♦ ♦
3-
93
KS
Set saturation coefficient Ks
♦ ♦ ♦
3-
94
UF
Update Filter Parameters
♦ ♦ ♦
3-
145
VF
Set velocity feed-forward gain
♦ ♦ ♦
3-
151
KI
MASTER-SLAVE MODE DEFINITION
Cmd. Description IMM PGM MIP Page
GR
Set master-slave Ratio
♦ ♦ ♦
3- 62
SI
Set master-slave jog update
interval
♦ ♦ ♦
3-
129
SK
Set slave axis jog velocity
coefficients
♦ ♦ ♦
3-
130
SS
Set master-slave mode
♦ ♦
3-
135
Section 3 – Remote Mode 3-13

 Loading...
Loading...








