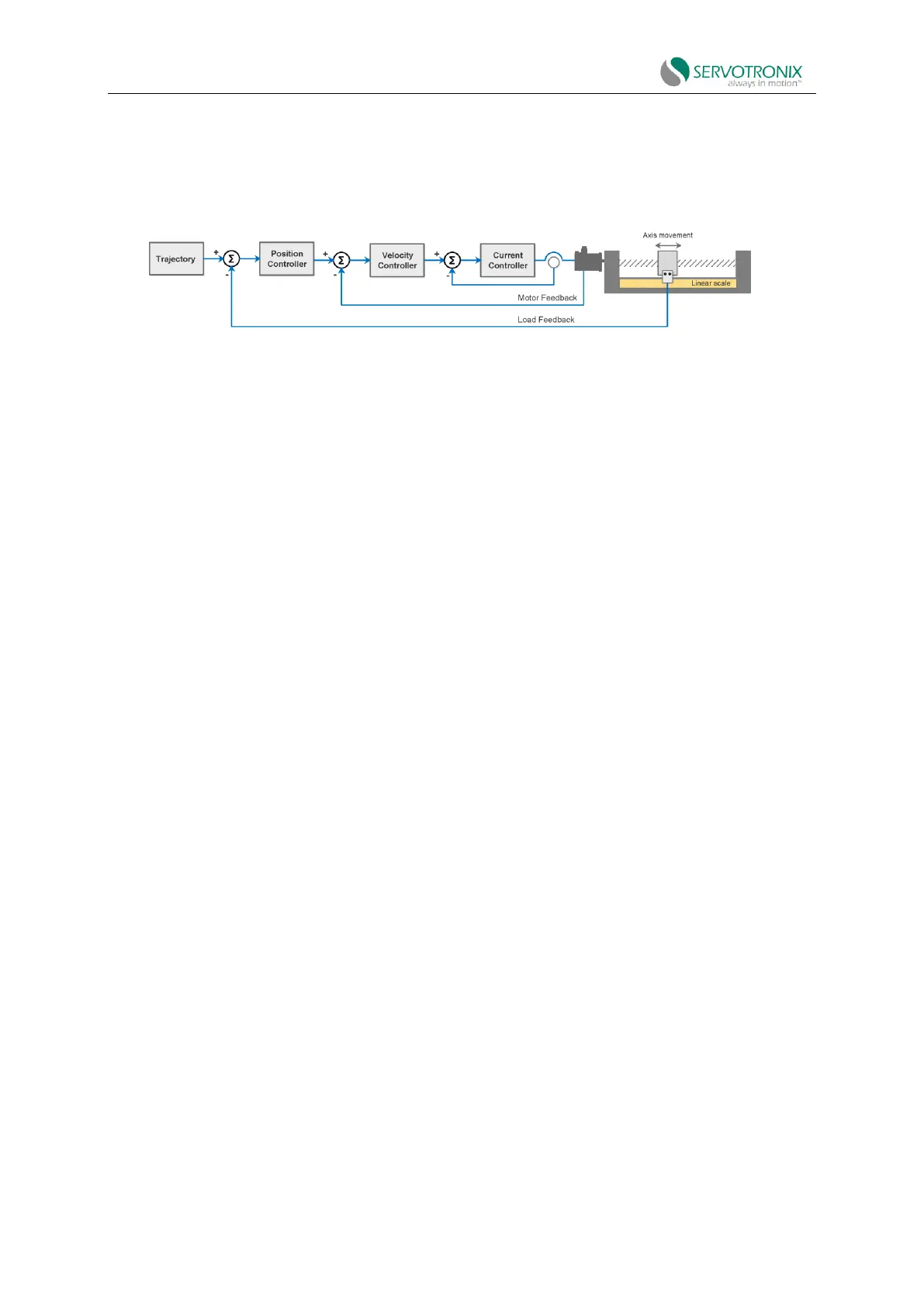
In dual-loop control, two feedback devices (usually encoders) are connected to one axis: one
feedback device is mounted on the motor and the other is connected to the load. The load feedback
device controls the positioning, while the motor feedback device controls the velocity and current.
Figure 6-26 Dual loop control using secondary feedback
In dual loop control, the secondary (load) encoder acts as primary positioning feedback.
Therefore, the following functions are performed on the load feedback:
⚫ Homing, including index homing. Please refer to the Homing.
⚫ Encoder analog output. Please refer to Encoder Analog Output.
⚫ AB quadrature encoder interpolation.
⚫ Contact probe capture.
Dual loop control is available in the following operation modes:
⚫ OPMODE4 (gearing/pulse train)
⚫ OPMODE8 (serial position)
⚫ CiA402 mode 1 (profile position)
⚫ CiA402 mode 8 (periodic synchronization position)
For dual loop control, the motor feedback device is connected to the CDHD2S feedback
connector (C4) and the load feedback device is connected to the secondary encoder pin on the
CDHD2S connector (C3).
When using dual loop control, the gearing input must through the controller interface (C2);
GEARMODE0, 1 and 2.
Note: When the CDHD2S error correction function is used in a dual control loop system, the
secondary (load) encoder value is corrected.
6.6.2 Secondary feedback device
CDHD2S dual loop control can be implemented by using either a rotary motor (MOTORTYPE=0)
or a linear motor (MOTORTYPE=2).