Figure 6-37 Impact of the second disable command on active disable
The legend in the “ServoStudio2 Emergency Stop" screen shows active disable behavior.
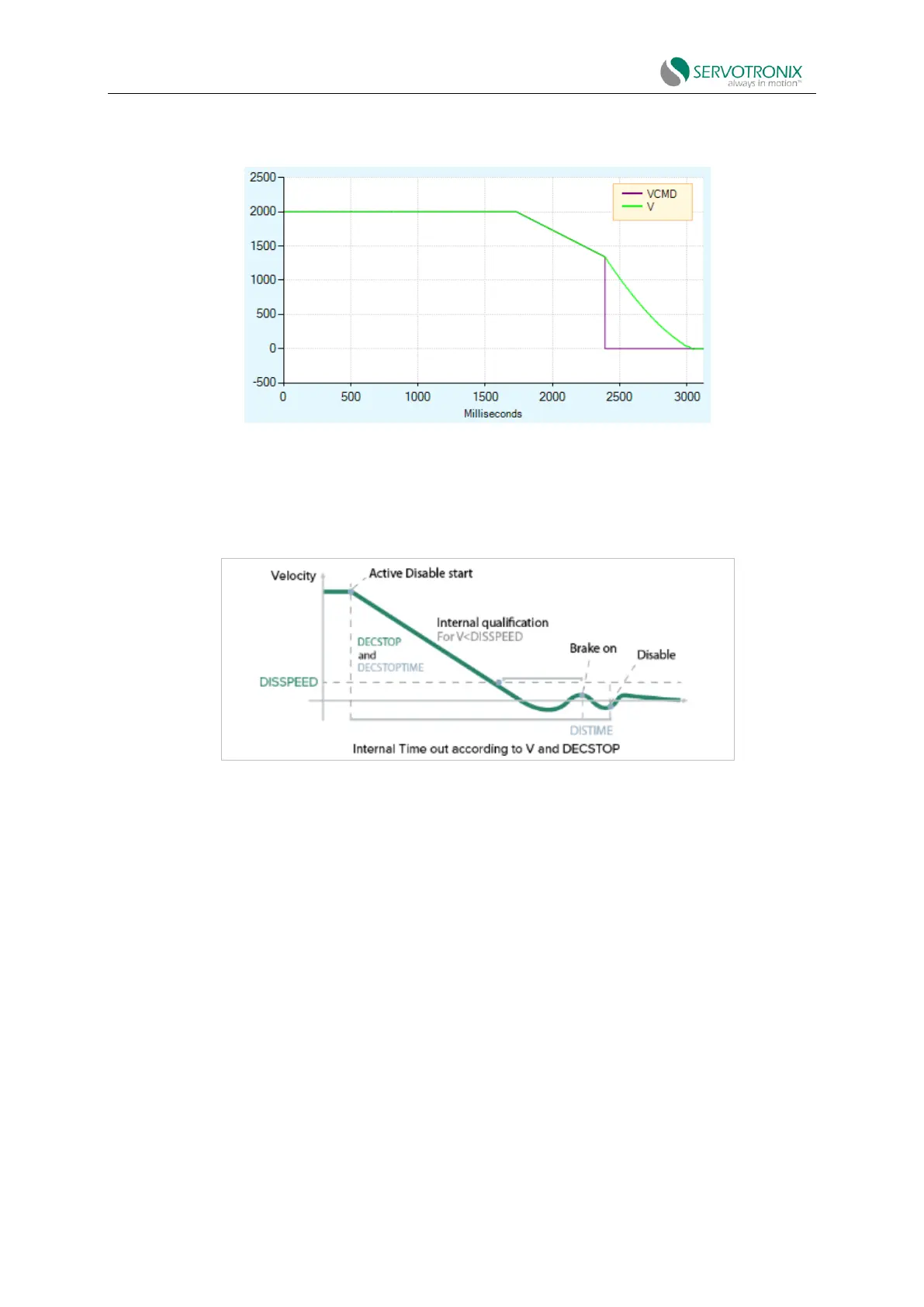
Figure 6-38 Disable stop
If a digital output is configured for brake control, the brake will be enabled as soon as the
DISTIME timer starts counting.
If the internal timeout (calculated based on the actual velocity and DECSTOP) runs out, the
descent mechanism will also be suspended, such as the 1 in disable stop figure.
6.14.2 Dynamic braking
The dynamic braking mechanism can disable the drive to control the motor. Only the motor
back EMF is used to apply the stopping current. The variable ISTOP is used to set the maximum
allowable current during dynamic braking.
Figure 6-39 shows the motor coasting, i.e. without dynamic braking (and without active disable).
The velocity command will be set to zero immediately after the drive is disabled. The actual velocity
will be decreased due to system inertia and friction.