Figure 6-35 Disable (use active disable)
Figure 6-36 shows the effects of DISSPEED and DISTIME. In this example, DISSPEED is set to
1000 and DISTIME is set to 1ms. The motor velocity remains below 1000 for 50ms and after the
time defined by DISTIME has elapsed, the drive will be disabled and the motor coasts to a stop.
In this example, it takes approximately 110ms from the time the motor velocity drops below
1000 and the drive is disabled.
Figure 6-36 Impact of DISSPEED and DISTIME on active disable
During the descent process in the active disable mode, the drive will ignore any new motion
commands.
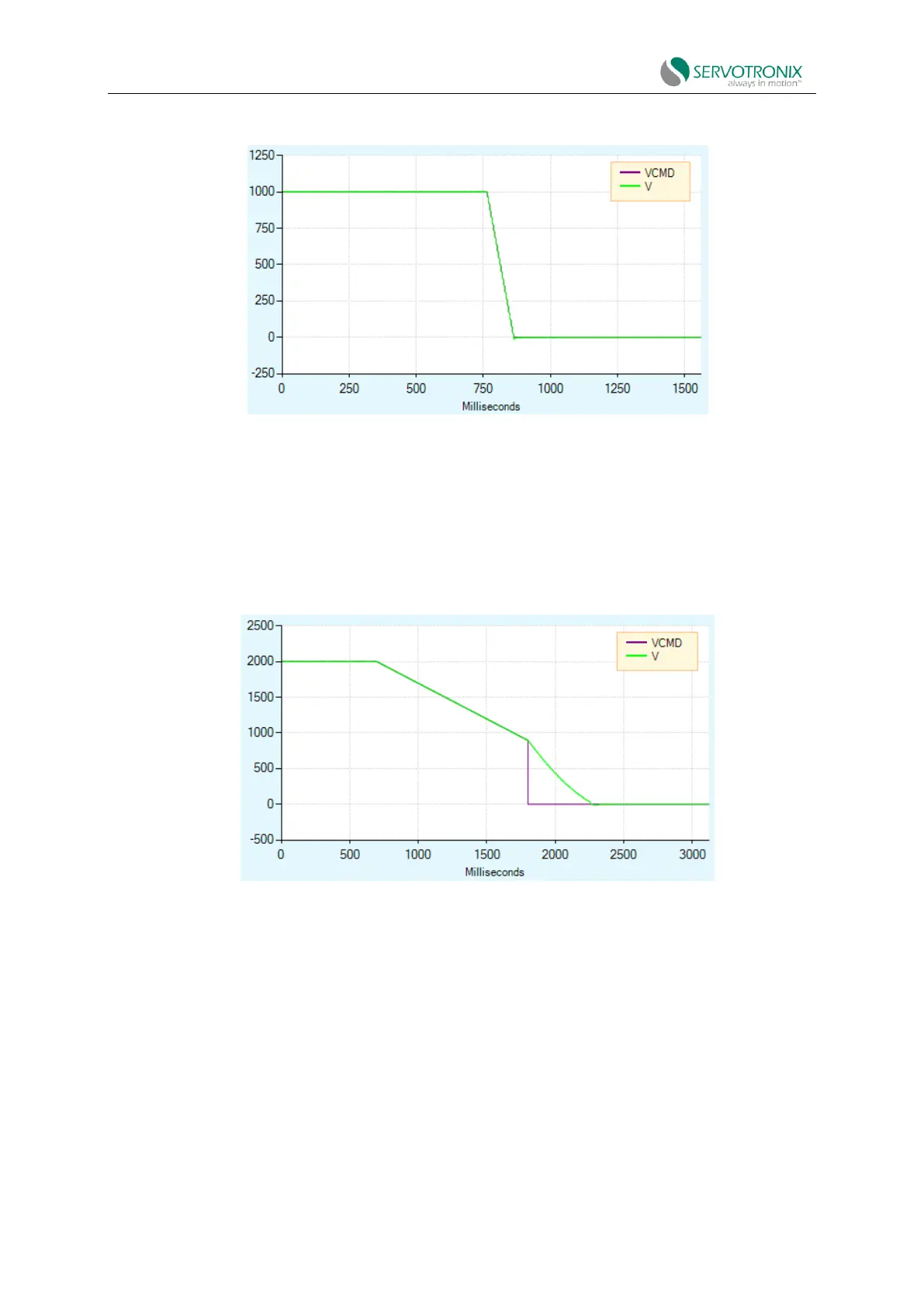
If an additional disable command (VarComK) is issued during the descent process, the descent
process will be stopped and the drive will be disabled immediately.
Figure 6-37 shows the impact of the second disable command. In this example, DISSPEED is
set to 1000 and the second disable command is issued before the motor velocity descend to this
level.