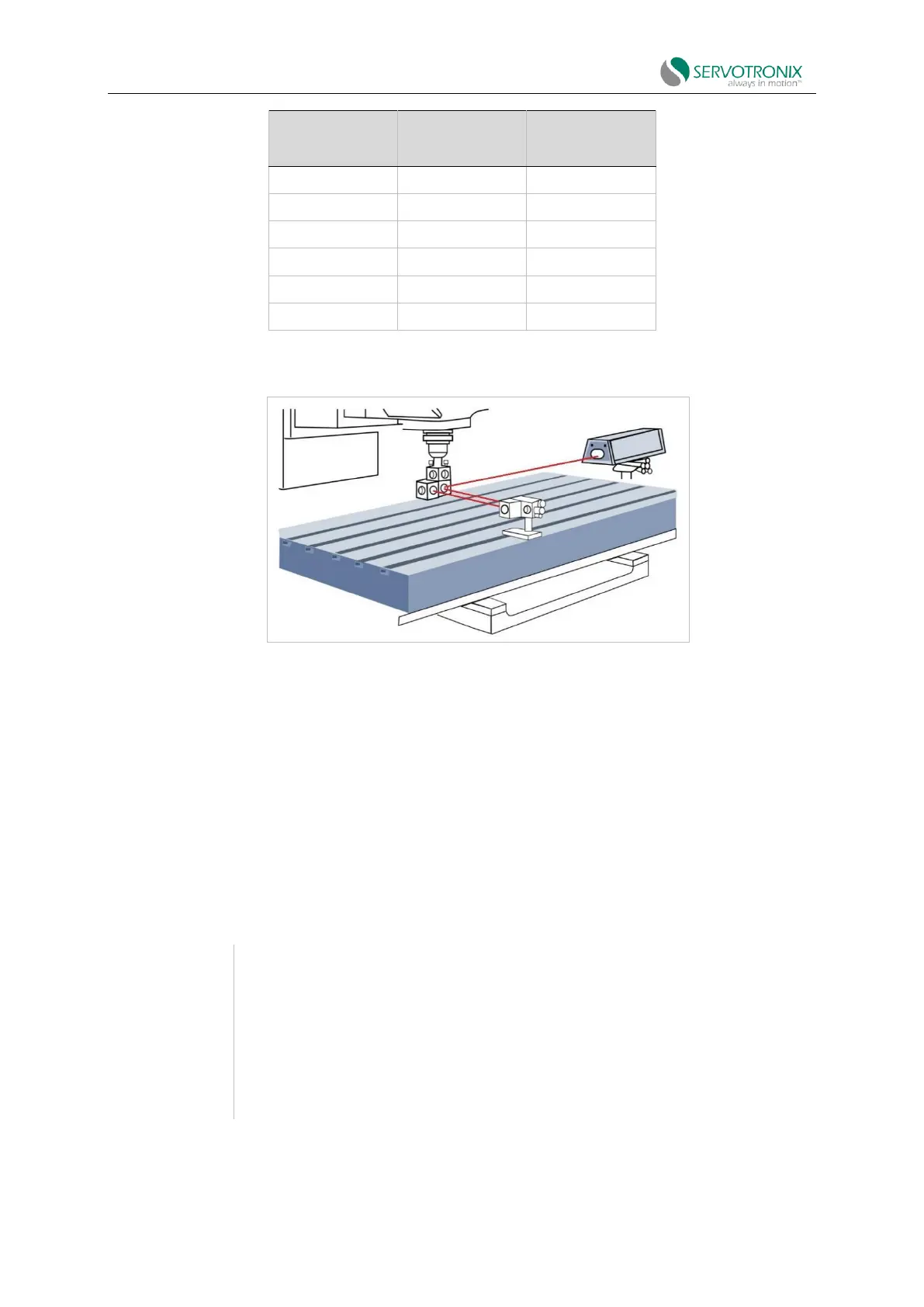
Figure 6-44 Laser interferometer measuring travel distance
6.17.3 Error correction function of CDHD2S
The CDHD2S error correction function can be applied in several motor system types:
⚫ Direct drive linear platform
⚫ Direct drive rotary platform
⚫ Linear platform driven by servo drive (motor rotates and the error is linear)
⚫ Rotary platform driven by servo motor (motor rotates and load rotates)
Error correction is available for all absolute and incremental encoders supported by CDHD2S.
When the CDHD2S error correction function is used in a dual control
loop system, the secondary (load) encoder value is corrected. When the
CDHD2S error correction function is used in a single control loop system,
the primary (motor) encoder value is corrected.