Figure 8-39 Equipment flexibility
Procedure: Flexible compensation tuning
1.Set NLAFFLPFHZ=3×KNLD
2. Start with the highest value of NLPEAFF and decrease until you reach the best result for your
application. The criterion can be settling time or position error.
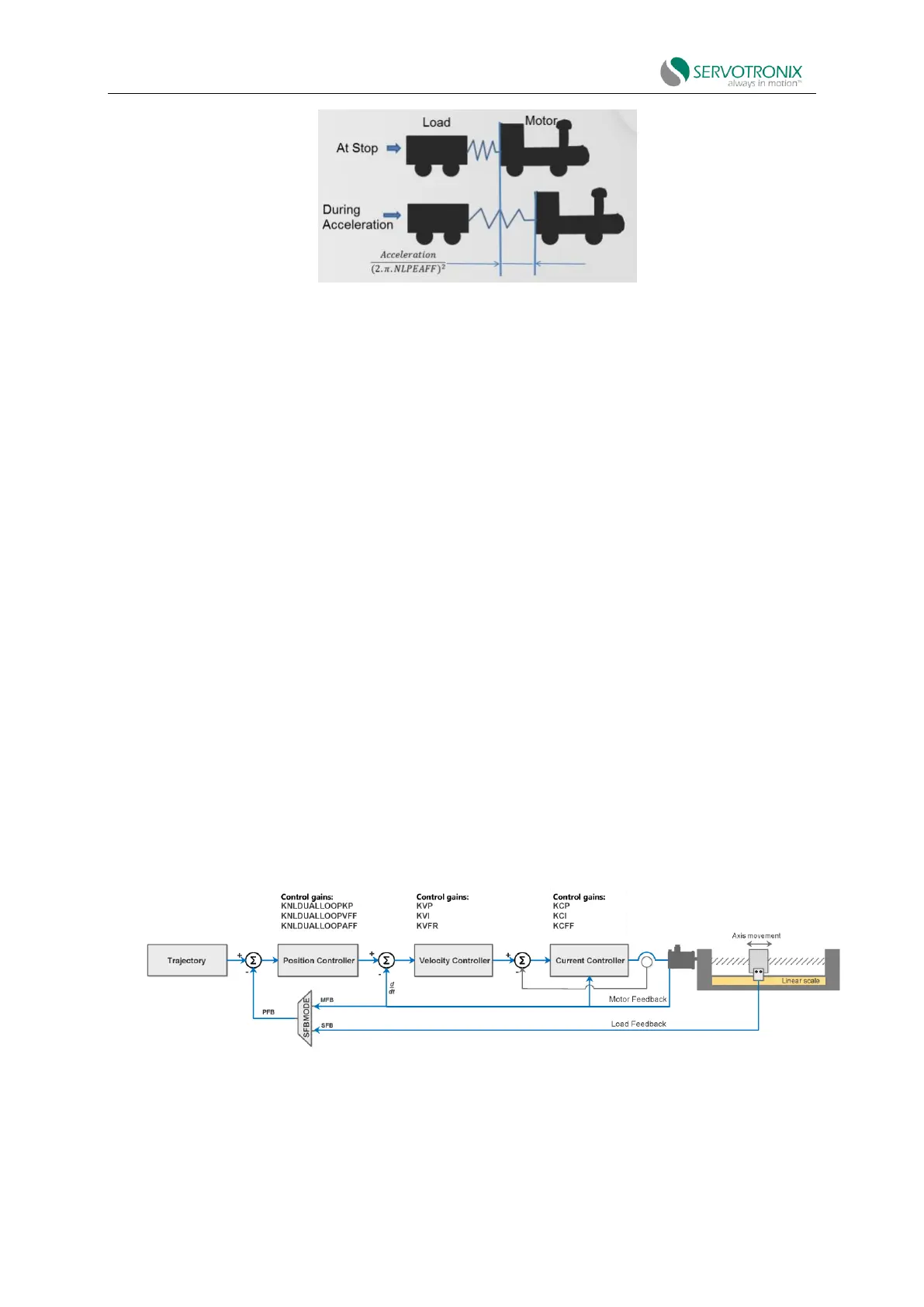
8.14 Dual feedback position control loop debugging
Note ServoStudio2 has not been fully updated.
The variable position feedback (PFB) represents the feedback used to control positioning when
secondary feedback is enabled and used in the control loop (SFBMODE1).
The position controller in the dual feedback control system is a dedicated P-gain controller
with velocity feedforward and acceleration feedforward. The velocity loop can be PI or PDFF and
uses motor feedback to control the motor. Current loops also use motor feedback to control the
motor.
The dual feedback position controller includes three gain parameters:
⚫ KNLDUALLOOPKP: Position loop proportional gain.
⚫ KNLDUALLOOPVFF: Position loop velocity feedforward.
⚫ KNLDUALLOOPAFF: Position loop acceleration feedforward.
Figure 8-4 Dual feedback position control loop
Procedure: Tune a dual feedback position control loop
1. Make sure the drive is running in serial communication mode (COMMODE0).