7.6 Gearing/Pulse Train Operation
In the gearing/pulse train operation mode, the drive current, velocity and position loops are
active loops and the drive is synchronized to the main input command signal of the pulse train. The
CDHD2S can be configured to read this input signal as an encoder follower, up/down counter, or
pulse/direction counter.
In the ServoStudio2 "Movement" screen, select "Operation Mode" - gearing/pulse train to
modify and monitor parameters.
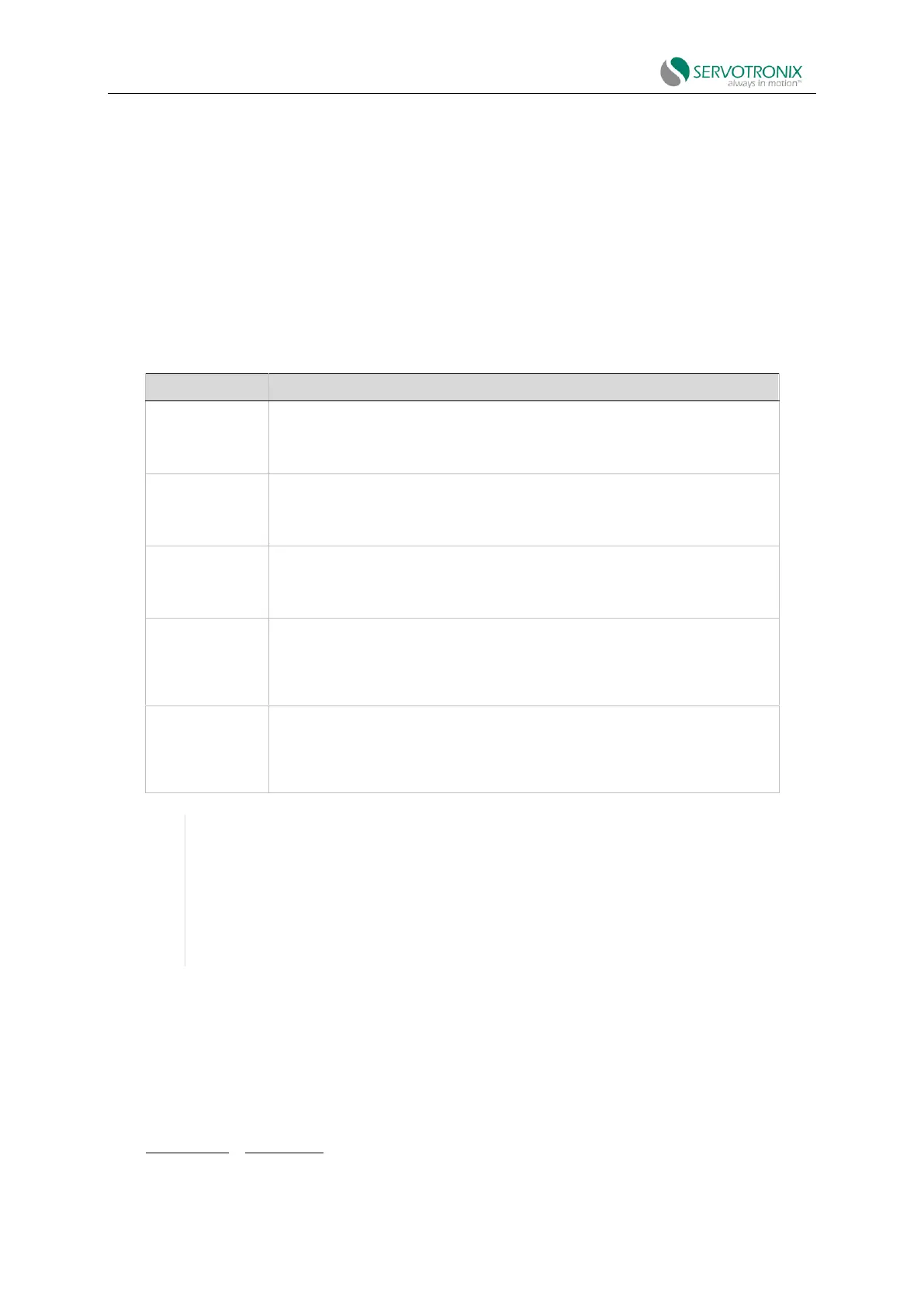
Various gearing methods are defined by the parameter GEARMODE.
Table 7-5
Encoder following; send a signal through the controller interface (C2).
Signals are received at pins 28 and 11 (quadrature A) and pins 9 and 27
(quadrature B) through the controller interface.
Pulse and direction; send a signal through the controller interface (C2).
Signals are received at pins 28 and 11 (pulse) and pins 9 and 27 (direction)
through the controller interface.
CW/CCW (up/down); send a signal through the controller interface (C2).
Signals are received at pins 28 and 11 (CW) and pins 9 and 27 (CCW) through
the controller interface.
Encoder following (secondary encoder); send a signal through the machine
interface (C3).
Signals are received at pins 1 and 11 (quadrature A) and pins 2 and 12
(quadrature B) through the machine interface.
Pulse and direction (secondary encoder); send a signal through the controller
interface (C3).
Signals are received at pins 1 and 11 (pulse) and pins 2 and 12 (direction)
through the controller interface.
GEARMODE0:
The controller interface (C2) cannot supply voltage to the handwheel or the main
encoder of the machine. This voltage is only available from the machine interface
(C3).
GEARMODE0, 1, 2:
If inputs 5 and 6 are set for INMODE17 and 18 respectively, signals are received from
fast inputs 5 and 6 at controller interface (C2) pins 32 and 15.
Regardless of whether gearing mode is used, the input signal needs to be geared, allowing you
to set the input pulse ratio to the encoder count. Gearing establishes the relationship between the
number of input pulses (HWPEXT counts) and the motor shaft position increment. The occurrence
rate of motor shaft (motor velocity) position increment is determined by gearing relationship and
pulse train line frequency. The gearing relationship is as follows: