3.3 Control Specifications
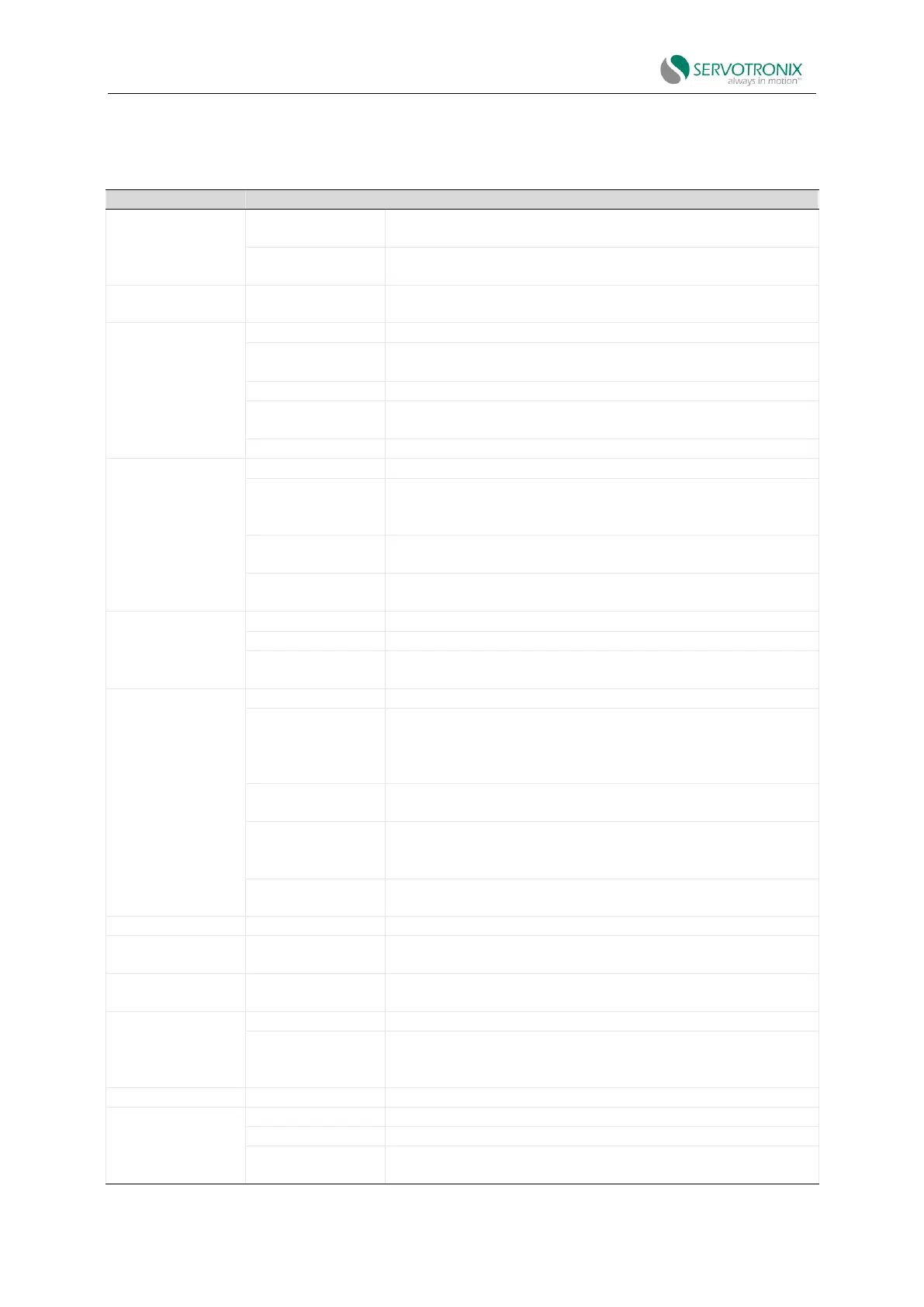
Table 3-4 Control specifications
DC brushless motor, DC brush motor, voice coil motor, rotary servo
motor, linear servo motor
Auto-configuration of motor phase, encoder direction and Hall phase
sequence.
Current (torque) control, velocity control, position control, HD control,
double-loop control, gantry control
Refresh rate 31.25μs(32KHz), output sine wave
The actual current reaches the command current within two cycles, i.e.
62.5μs
Analog DC voltage ± 10V, serial port RS232 or USB, CANopen,
EtherCAT
Automatic setting of current control loop parameters
Refresh rate 125μs (8kHz)
Optional velocity
control loop
PI, PDFF, standard pole placement, advanced pole placement,
standard pole placement high-frequency, dump active pole
placement
First order low pass filter, double first order low pass filter, notch filter,
high-pass filter, bandpass filter, user-defined polynomial filter
Analog DC voltage ±10V, serial port RS232 or USB*, CANopen,
EtherCAT
Refresh rate 250μs (4kHz)
Electronic gearing pulse and direction, serial port RS232 or USB,
CANOpen, EtherCAT
Refresh rate 125μs (8kHz)
Nonlinear control algorithm provides low tracking error, smooth
motion with zero or minimum settling time; it includes an adaptive
feedforward feature that is applied at the end of motion to deliver
zero or minimum settling time.
One second order low pass filter, two notch filters, and other filters for
handling flexible and resonant systems
Velocity: Analog DC voltage ± 10V, serial port RS232 or USB,
CANopen, EtherCAT
Position: Pulse, serial port RS232 or USB, CANopen, EtherCAT
Automatic inertia load measurement, automatic setting and
optimization of HD control loop parameters.
Position control of H-shaped mechanical structure
Controller braking, dynamic braking, electromechanical braking by the
motor.
7-segment LED (green) to display drive status
Windows based ServoStudio2 application
Setup connection, drive information, power information, motor,
feedback, input/output selection/configuration, action setting/tuning,
fault history/display, setup wizard, expert view
User defined input signal ratio
Acceleration/Decelera
tion