When COMMODE=1 (EtherCAT/CANopen communication; with fieldbus), the operation mode
can be profile position (opmode1), periodic cycle position (opmode8), and homing (opmode6).
Reference commands can be generated by EtherCAT/CANopen, pulse train or serial
communication devices.
6.18.5 Gantry parameters and commands
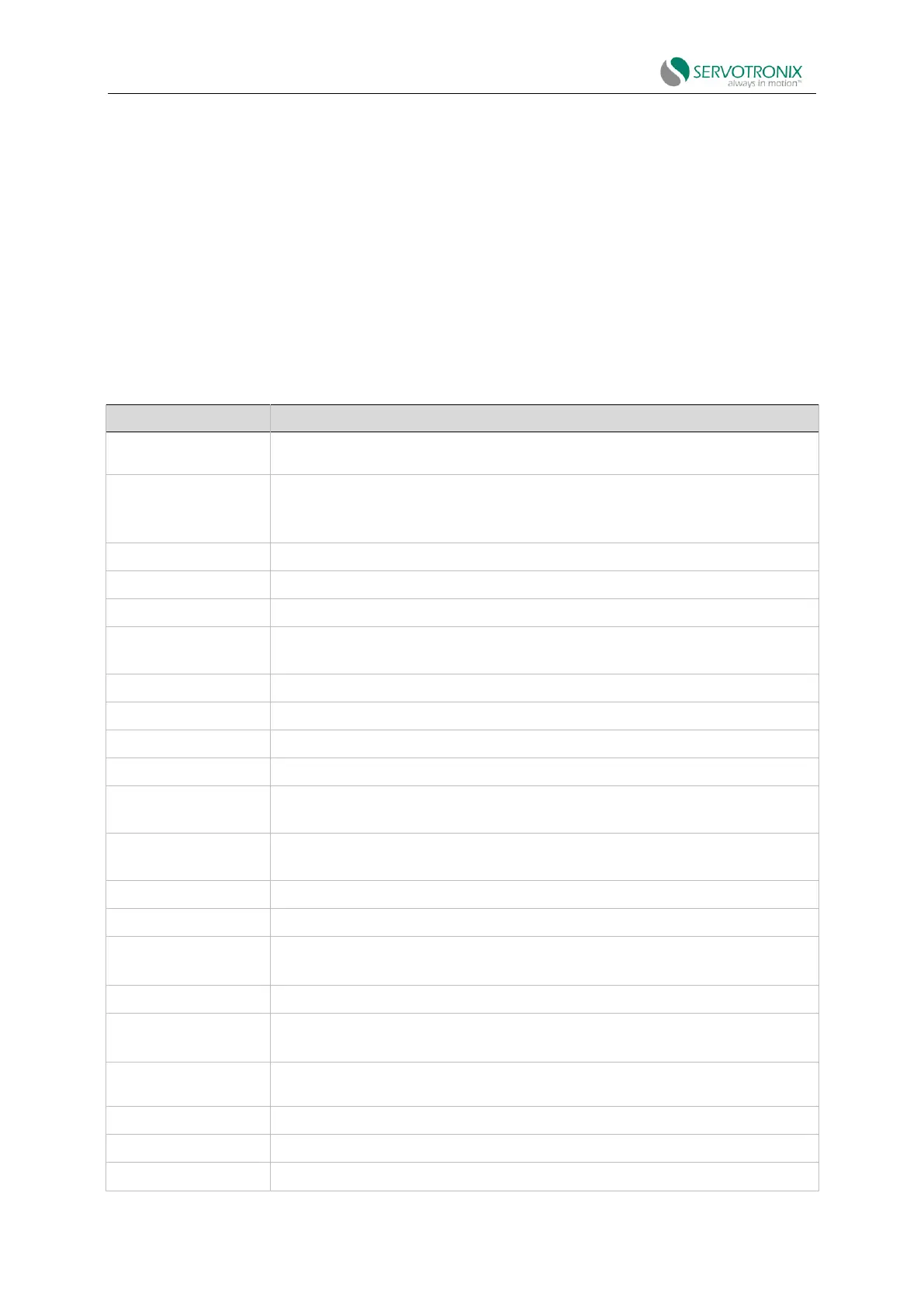
The following parameters are used to configure and monitor gantry applications.
Some parameters apply to both main and differential axes, while others apply only to one
gantry axis. Please refer to the VarCom documentation for details.
Table 6-26
Define whether the position loop is applied to the mean or the difference between the
positions of two gantry motors.
Define how the gantry drive responds to reference commands. Defines the
position feedback value that the drive will report through
EtherCAT/CANopen object and encoder simulation.
Define the alignment method of flexible gantry system.
Define the gantry structure as rigid or flexible.
Indicate whether the gantry drive is communicating.
Define the controller interface used to connect the communication cables between
gantry drives.
Gantry main position feedback value=(Y1+Y2)/2 (read-only).
Gantry differential position feedback value=(Y1-Y2) (read-only).
Gantry main position feedback value=(V1+V2)/2 (read-only).
Gantry differential position feedback value=(V1-V2) (read-only).
Current command generated by gantry master controller (read-only).
Current command generated by gantry differential controller (read only).
Start the gantry Y-axis alignment program.
Indicate whether the Y-axis of the gantry is aligned (read-only).
Indicate the program for finding the difference (distance) between reference points Y1
and Y2.
Indicate the status of gantry offset finding program.
Distance difference between reference points Y1 and Y2 Required value of flexible
gantry system.
Indicate whether the stored GANTRYOFFSET value is valid and can be used for
alignment program.
Second (pairing) gantry motor position (read-only).
Second (pairing) gantry axis current command (read-only).
Second (pairing) gantry motor velocity (read only).