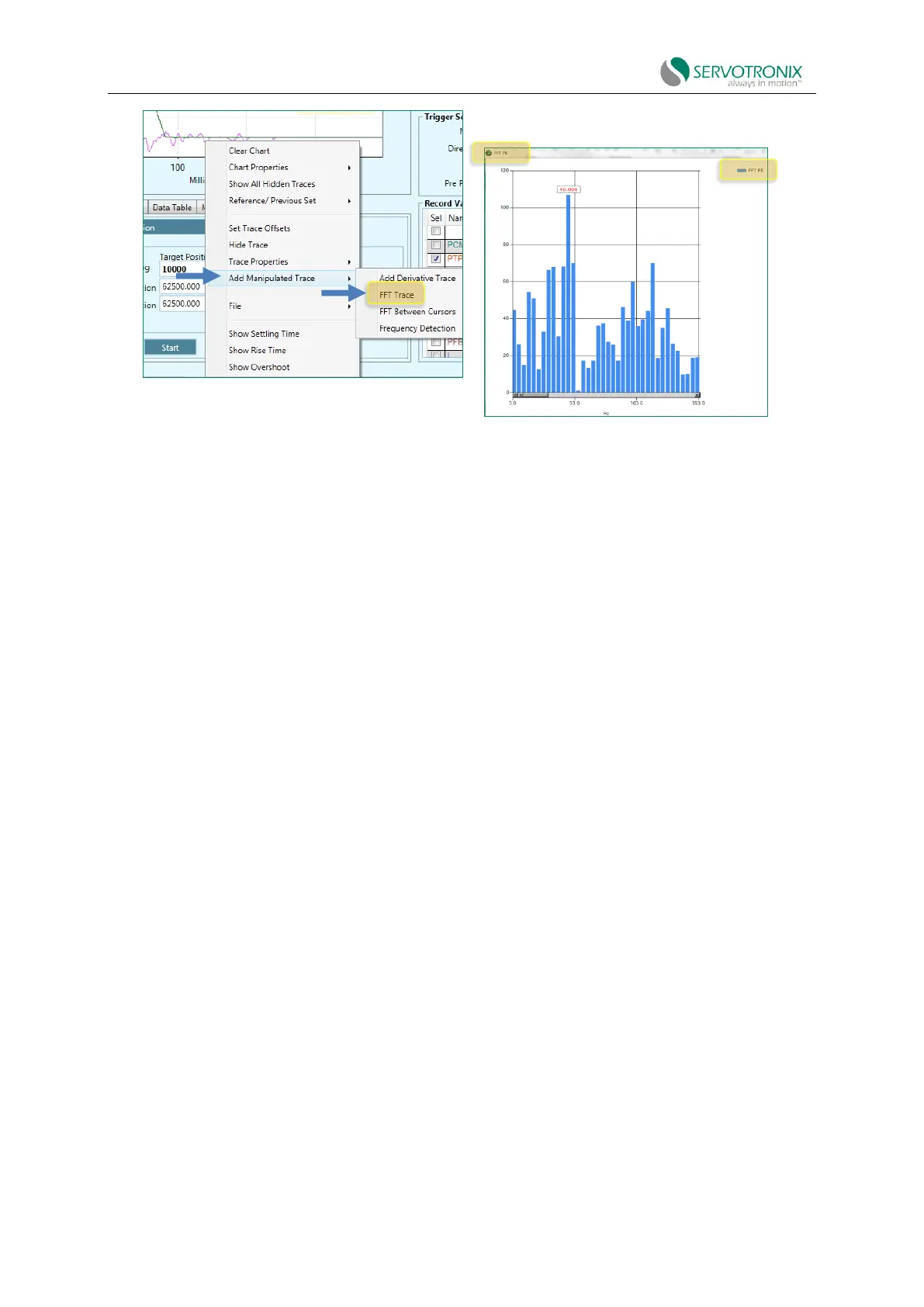
Figure 8-20 FFT tracking evaluation
8.7 Current Command Low Pass Filter
Note: ServoStudio2 has not been fully updated.
The HD control loop output is a current command. This current command is low-pass filtered
before being transmitted to the current controller. The autotuning procedure sets optimal low-pass
filter parameter values during the load estimation process.
⚫ NLFILTDAMPING (HD current filter damping), expressed as a percentage, maintains the
filter bandwidth at the cutoff frequency.
⚫ NLFILTT1 (HD current filter low-pass rise time), in milliseconds, defines the reciprocal of
the cutoff frequency.
If noise occurs, it may be necessary to fine-tune the low-pass filter.
Increase NLFILTT1 in 10% increments until the noise reaches an acceptable level.
If the system becomes unstable, the global gain (KNLUSERGAIN) may need to be reduced.
After tuning KNLD, NLFILTDAMPING and/or NLFILTT1 can be further tuned. Please refer to the
KNLD - Differential Gain.
To achieve the fastest response time of the HD control loop, the low-pass filter can be manually
adjusted. The goal is to use the maximum value of NLFILTDAMPING and the minimum value of
NLFILTT1.
1. Increase NLFILTDAMPING until ICMD noise and/or oscillations are observed, then decrease
by 10%.
2. Decrease NLFILTT1 until ICMD noise and/or oscillations are observed, then increase by 20%
and at least 0.05ms.