Define the velocity threshold below which the motor is considered stopped
and the active disable timer starts the countdown to disable. For a motor to
be considered stopped, the motor velocity must be at least 50 ms below this
threshold.
Define the continuous time that the motor must remain below DISSPEED
before the drive is disabled. DISTIME counter only starts counting after the
motor velocity has been lower than DISSPEED for at least 50 ms.
6.14.1 Active disable
Active disable prevents the motor from coasting when the axis is disabled.
The active disable mechanism stops the motor by controlling the speed to slow down to zero
and then disables the drive.
Note: Active disable cannot be implemented when the drive is in current control mode
(OPMODE2 or OPMODE3); it is valid in all other operation modes.
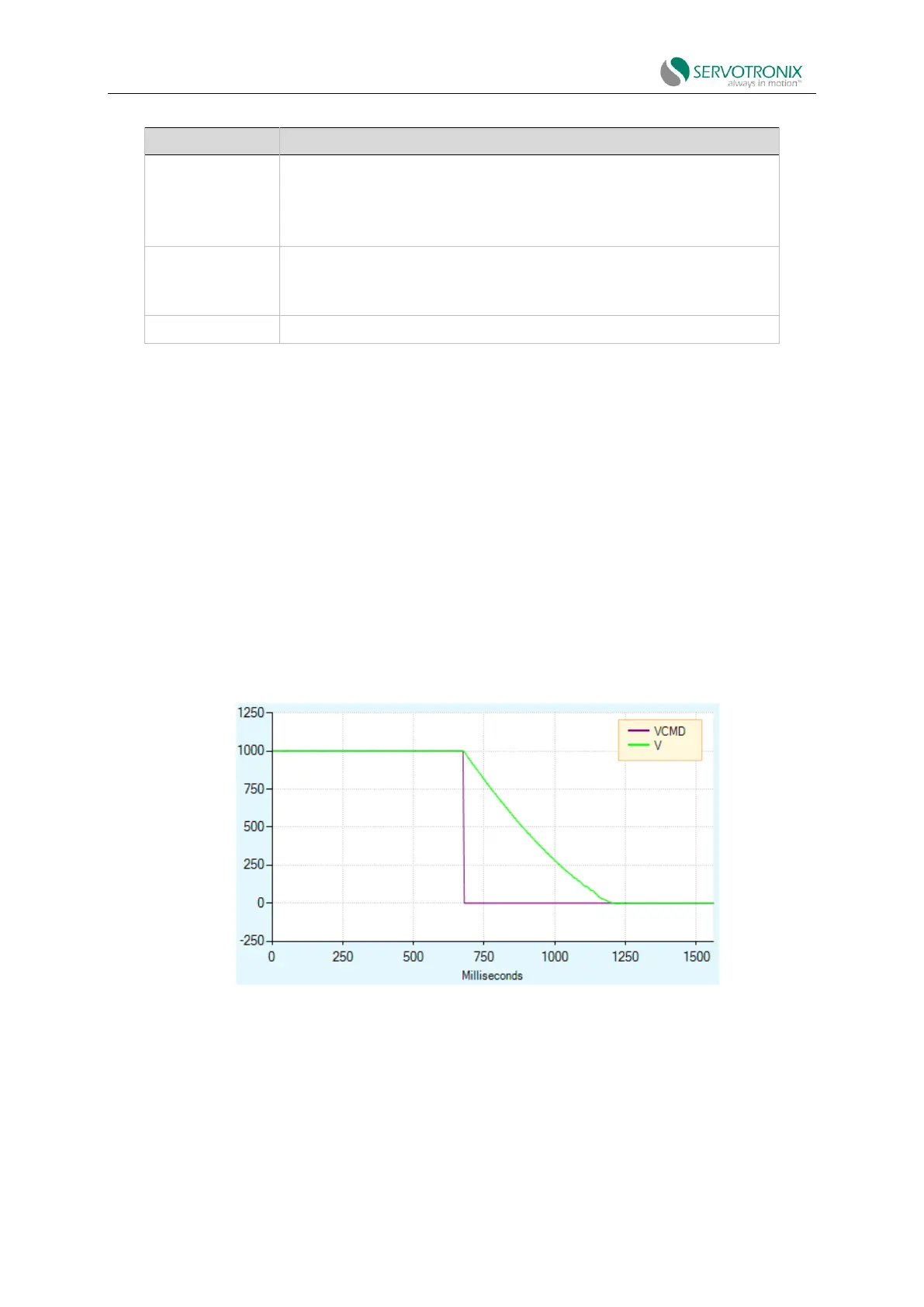
Figure 6-34 shows how motor coasting occurs when active disable is not used. The velocity
command will be set to zero immediately after the drive is disabled. The actual velocity will then be
decreased as a function of inertia and friction.
Figure 6-34 Disable (do not use active disable)
Figure 6-35 shows what happens when active disable is in effect. After the drive receives the
disable command, the velocity command will immediately slow down the velocity to zero and then
the drive is disabled.