6.17.4 Error correction parameters and commands
The following parameters are used to configure and execute the error correction function.
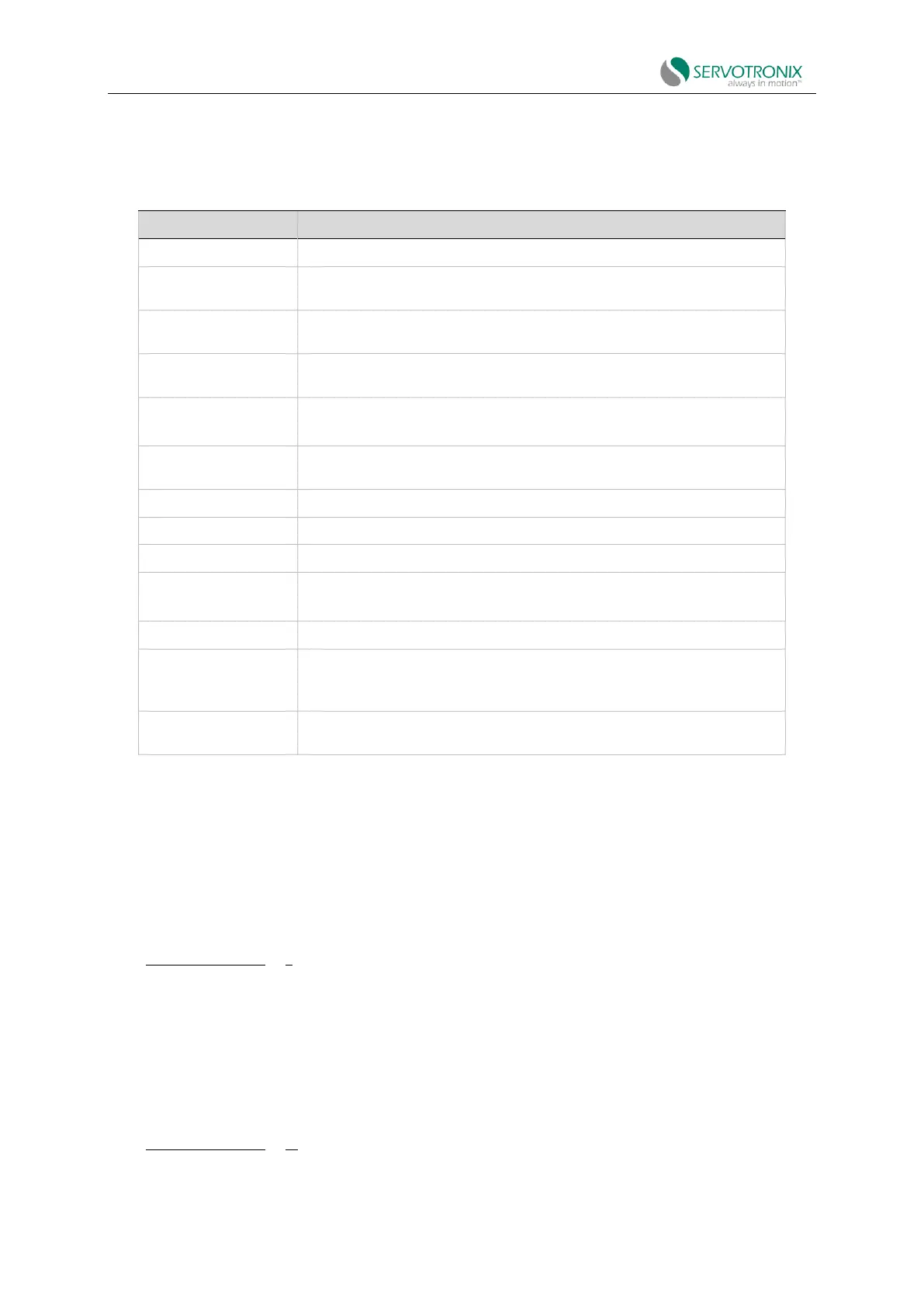
Table 6-24
Define user’s request to activate the error correction function.
Indicate the state of the error correction function after sending the user
request (ERRCOREN 1).
Define the position corresponding to the first valid input of the error
correction table.
Define that effective input times of the error correction table. The error
correction table can define (and take effect) up to 1000 inputs.
Define the measurement error and add the distance between the positions
where the correction table is located. Defined in unit of (LOAD).
Define the unit of error position data transmitted through the error correction
table.
Define the offset from the first valid input of the error correction table.
Denominator of motor feedback and load feedback scaling ratio.
Numerator of motor feedback and load feedback scaling ratio.
Used to restore all error correction parameters and table inputs to their
default values. When ERRCORRESET is set to 1, it will be reset.
Define the correction values specifically entered in the correction table.
An index indicating that the input of the error correction table failed due to
the invalid error size. The error shall not exceed the maximum value of 1
(rotation unit is degree/linear unit is millimeter)
Position feedback value, excluding error correction and position modulus.
Used for troubleshooting debugging.
6.17.5 Error correction feedback unit
Motor load ratio
When using a direct drive linear (DDL) platform or a direct drive rotary (DDR) platform, the
motor to load mechanical ratio is 1:1.
⚫ In this example, the motor and load position feedback (PFB) values and units are the
same.
When using a linear platform driven by a servo drive (motor rotates and the load is linear), the
mechanical ratio is 1 revolution of the motor per n mm of linear motion.