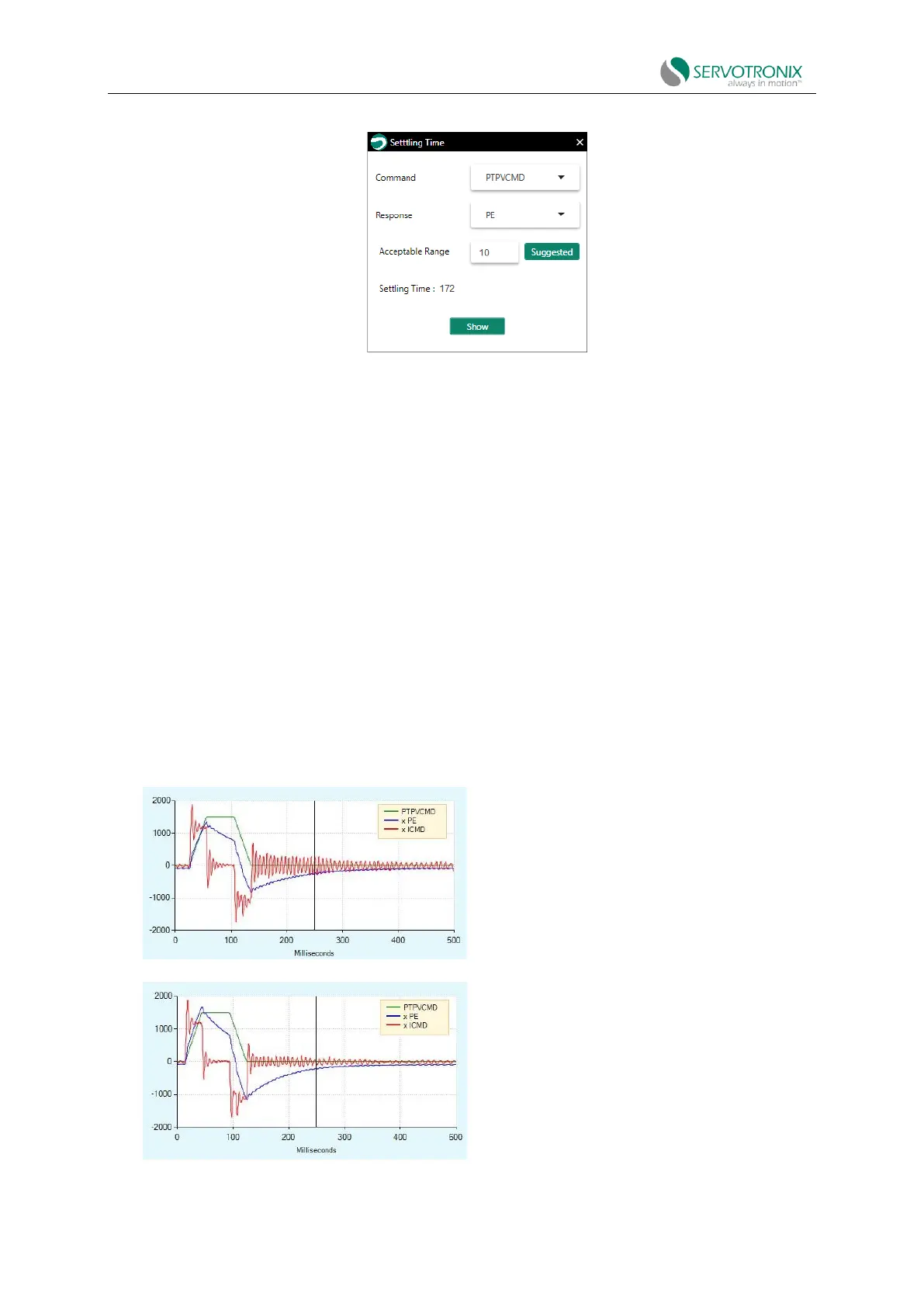
Figure 8-34 Settling time - with anti-vibration tuning
8.12 Gain - Manual Tuning
Note: ServoStudio2 has not been fully updated.
KNLD - differential gain
1. Set KNLP to half of the default settings.
2. Set KNLI and KNLIV to zero.
3. Increase the KNLD value until oscillations of ICMD are observed.
The acceptable level of ICMD ripple depends on the system, mainly the load. It can usually be
determined by acoustic noise. Light load (load/motor inertia ratio (LMJR) <2): 5% of rated current
may be normal.
High load (load/motor inertia ratio (LMJR) > 2): 10% of rated current may produce acceptable
ripple.
Figure 8-35 Differential gain tuning