Increase the KNLIV value until the position error (PE) starts to oscillate.
Increasing the KNLIV value can reduce the position error, reduce the sensitivity to external
disturbance, and reduce the steady-state position error (if any) when stopping.
Optimal tuning: Position error decreases as quickly as possible after each motion phase change
(jerk), no oscillations during phase transitions; no position error overshoot; oscillation at stop is
acceptable (±1 encoder count).
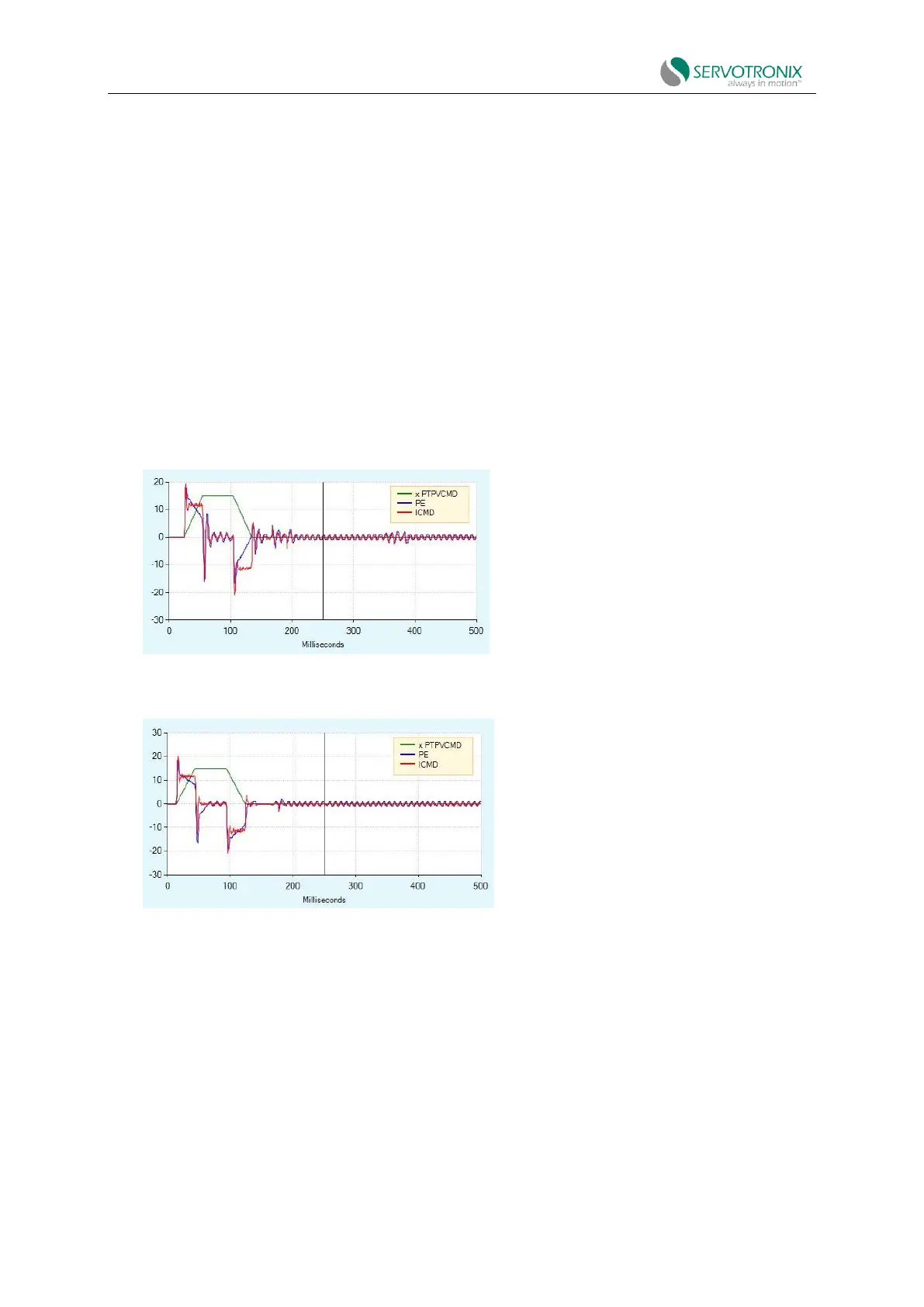
Optimal settling time: If possible, increase the KNLIV value until the position error returns to
0 before the end of the deceleration stage.
Figure 8-36 Differential - integral gain tuning
Increase the KNLP value until the position error (PE) starts to oscillate.
With the increase of KNLP value, the shape of position error becomes square, which reflects
the constant during acceleration and deceleration.
As the KNLP proportional gain becomes high, the position error reaches a stable value at each
stage of motion (acceleration, smooth, deceleration).