Optimal tuning: The shape is as square as possible, indicating that the position error is constant
at each stage of motion and that there are no oscillations during the transitions between stages
(acceleration to smooth, smooth to deceleration, deceleration to stop).
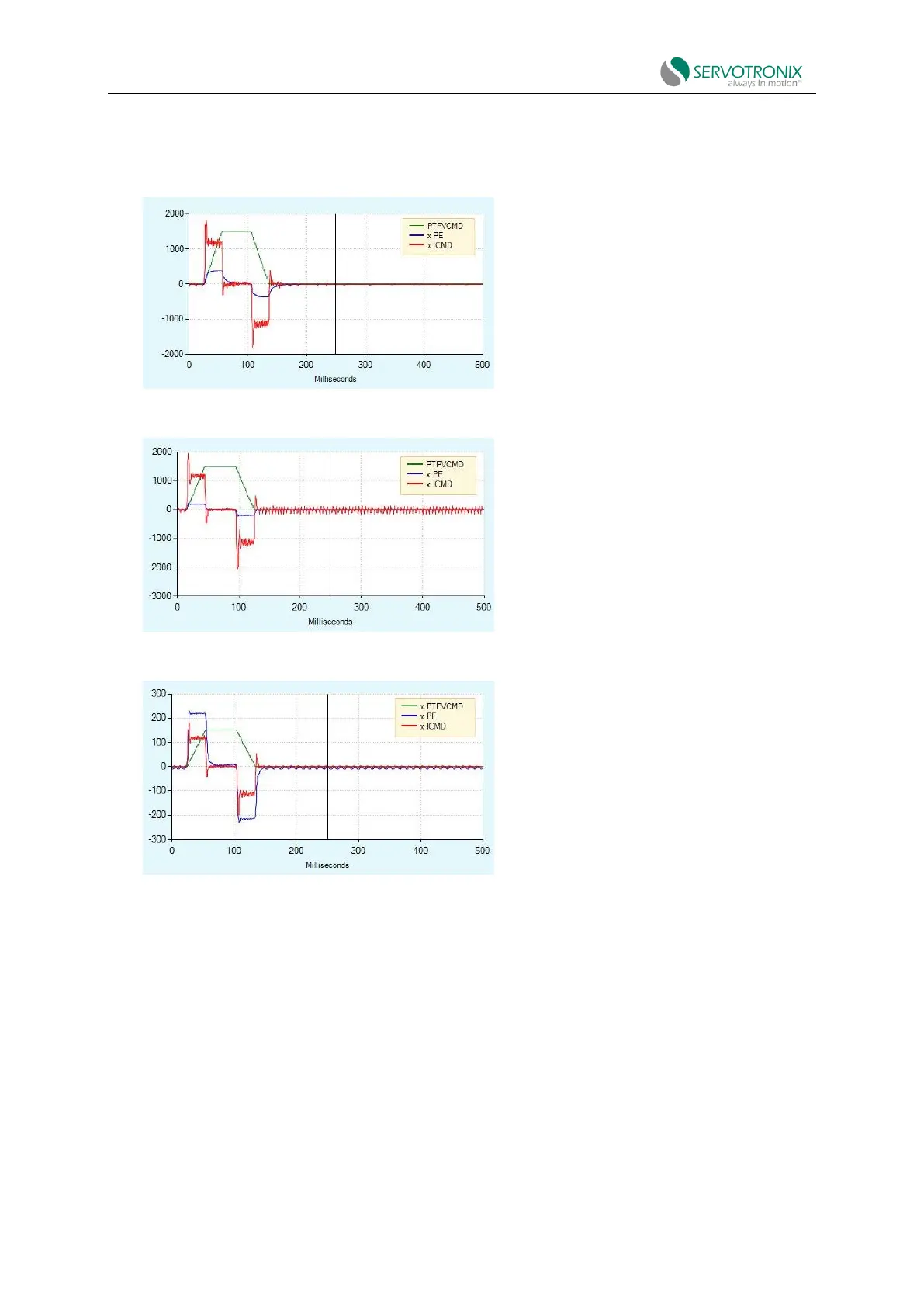
Figure 8-37 Proportional gain tuning
KNLI - integral gain
KNLI is used to reduce position errors during movement and stop.
Optimal adjustment: the maximum value that does not produce overshoot or oscillation.
Optimal settling time: If possible, increase the KNLIV value until the position error returns to 0
before the end of the deceleration stage.
Result: The position error is slightly reduced; the oscillation at stop is acceptable (±1 encoder
count); there is no position error overshoot at the end of the deceleration stage (stop point).