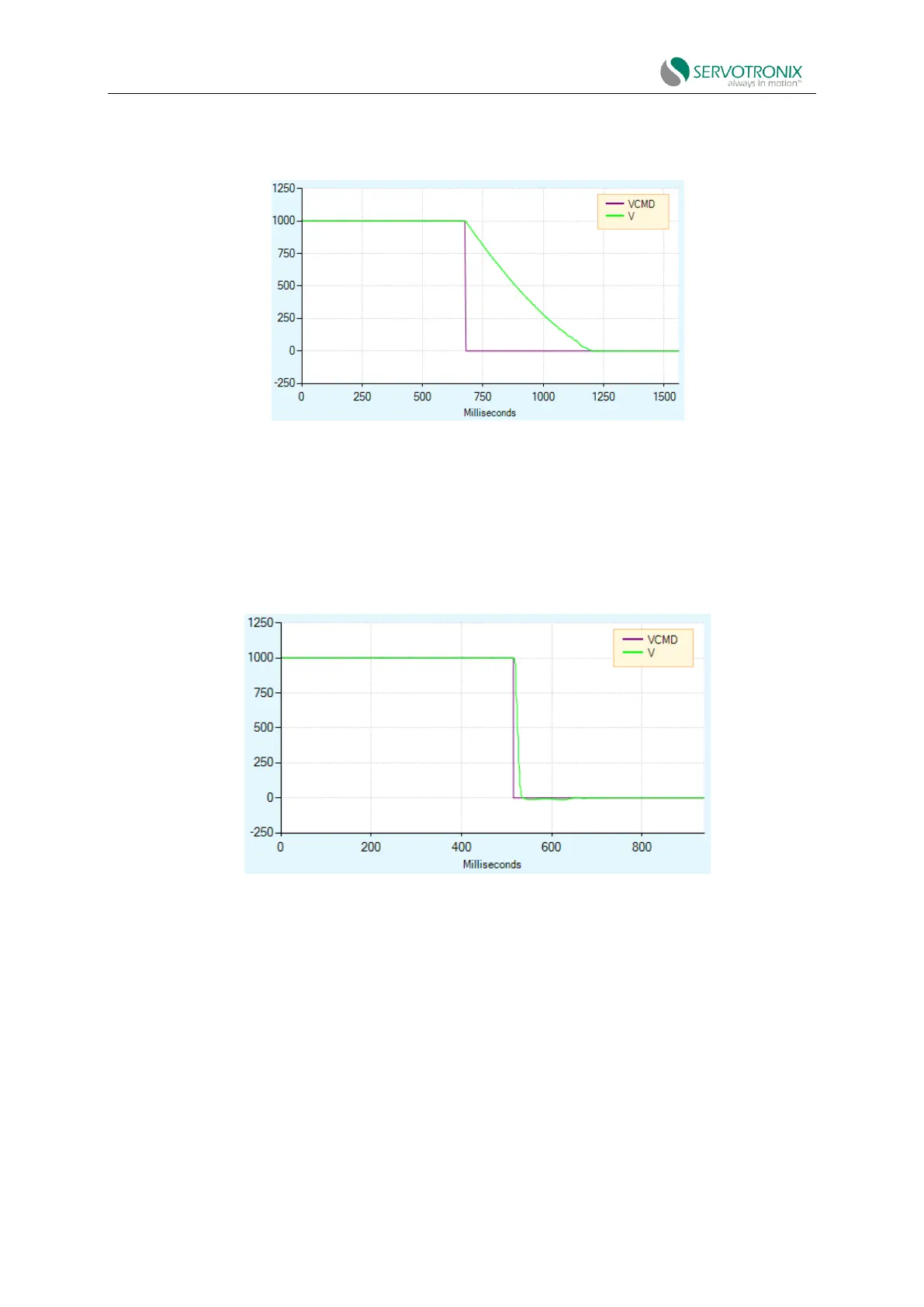
Figure 6-39 Motor coasting (without dynamic braking)
Figure 6-40 shows what happens when dynamic braking is in effect. As shown in the picture
above, the velocity command will be set to zero immediately after the drive is disabled. However,
the actual velocity will descend gradually after the brake is applied.
Unlike active disable, velocity does not descend along the motion trajectory. The descend rate
is a function of the maximum allowable current (variable ISTOP) and the system inertia and friction.
Figure 6-40 Dynamic braking
Figure 6-41 shows dynamic braking with extremely low ISTOP value. In this case, it takes longer
for the motor to stop.