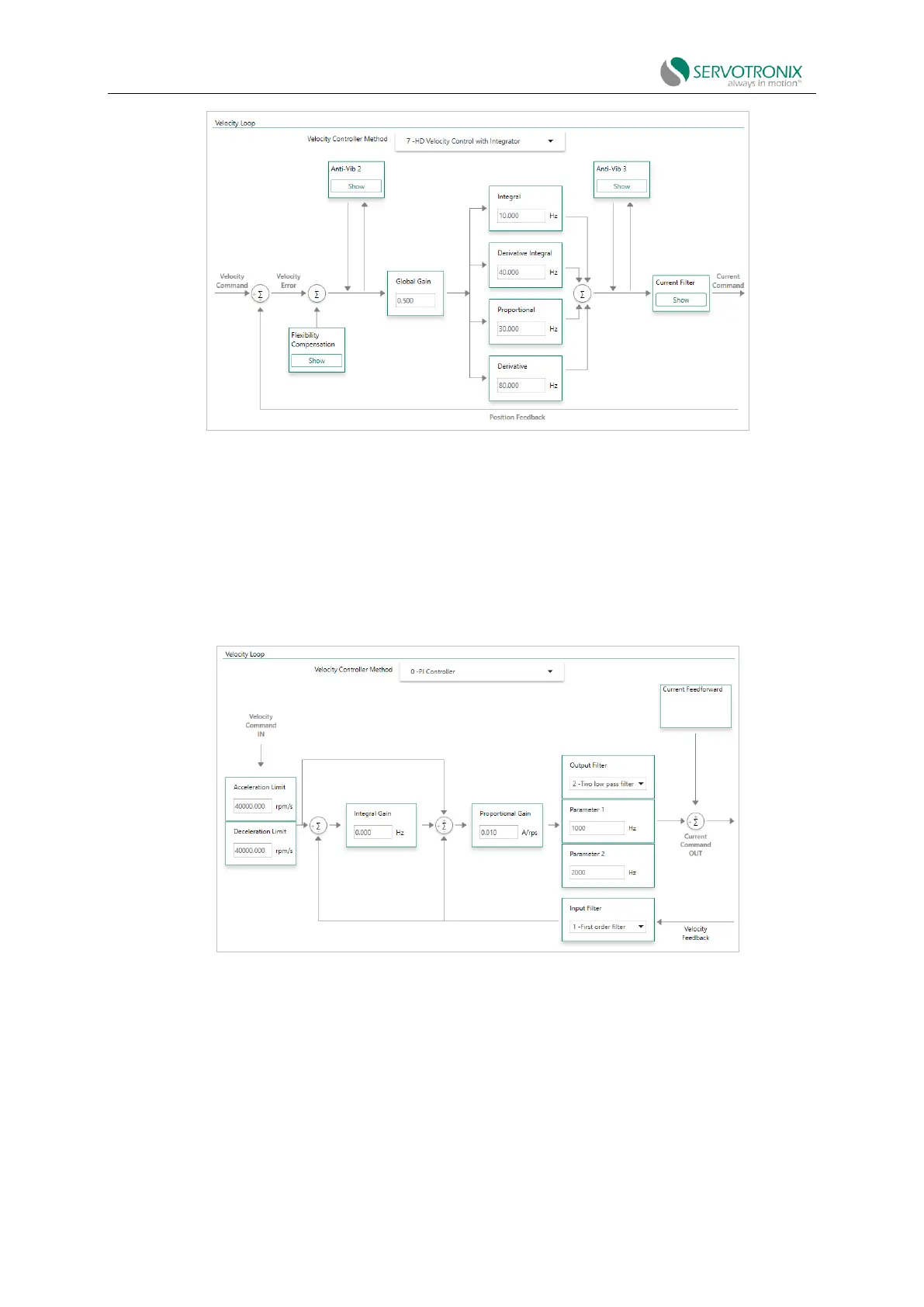
Figure 7-2 Velocity control loop - HD velocity control (with integrating circuit)
proportional-integral (PI) controller
Please refer to VarComVELCONTROLMODE0.
The figure below shows the PI controller.
Figure 7-3 Velocity control loop - PI controller
The PI controller is a unit feedback system without prefilter. The proportional gain (KVP)
stabilizes the system and The integral gain (KVI) compensates the steady-state error.
The controller parameters KVP and KVI as well as KVFR are tuned through trial and error.
Pseudo-differential feedforward feedback (PDFF) controller