4. Make sure the drive is enabled and click the Run Record and Plot button in the Range toolbar.
Figure 8-14
Note that the trajectory scale factor of the "Position Error" variable shown here is 50.
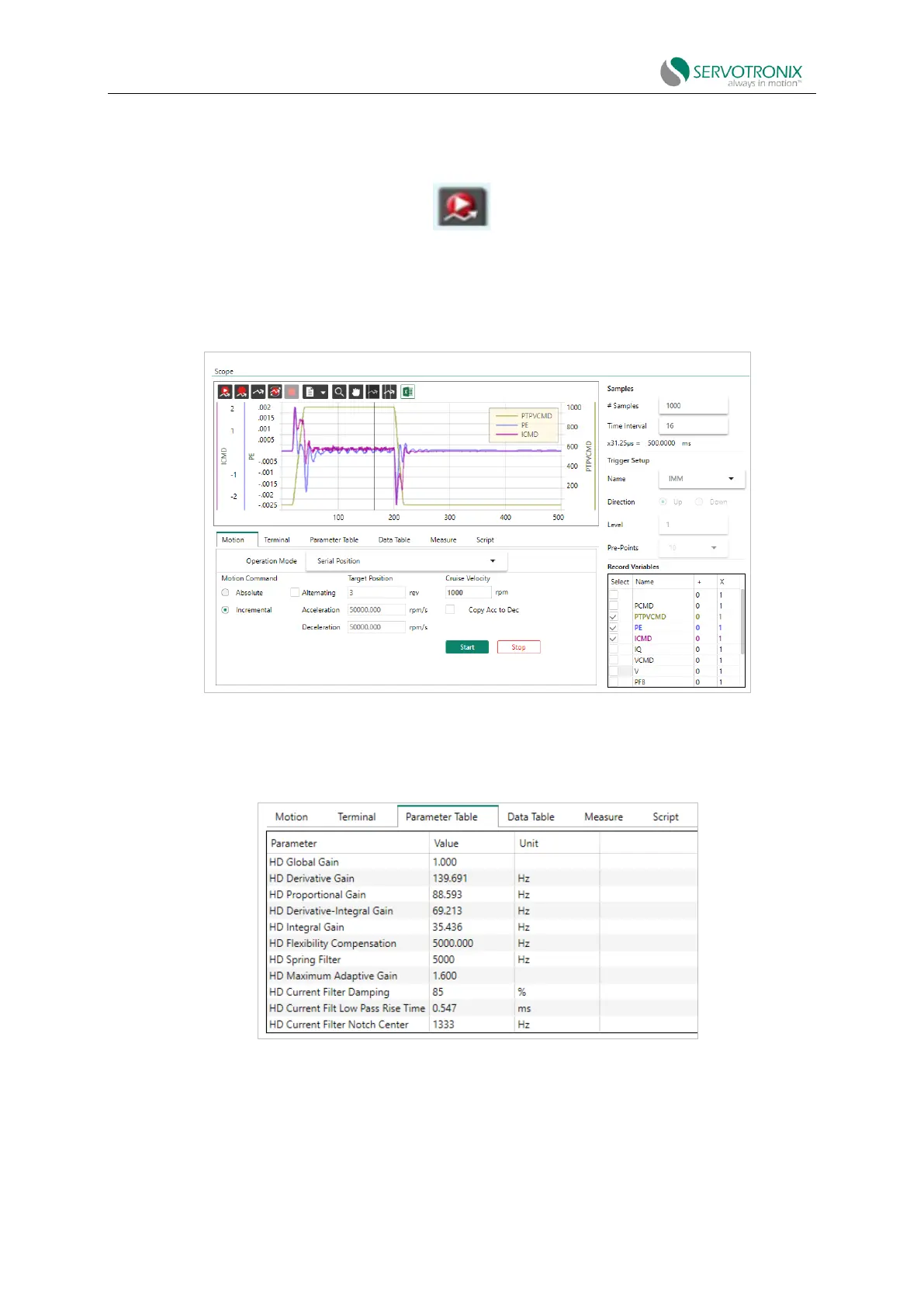
Figure 8-15 Motion obtained using default parameter values
5. Select the "Parameter Table" tab.
Figure 8-16 Parameter - example
The parameter KNLUSERGAIN (HD global gain) is set to 1.000 during autotuning. For other
manual tuning, you can start with this setting. If the gain is too high - as evidenced by vibration and
noise - lowering the value of KNLUSERGAIN can deliver a smooth motion.