Advanced commissioning
6.7 Application-specific functions
Converter with the CU240B-2 and CU240E-2 Control Units
Operating Instructions, 01/2016, FW V4.7 SP6, A5E34259001B AC
311
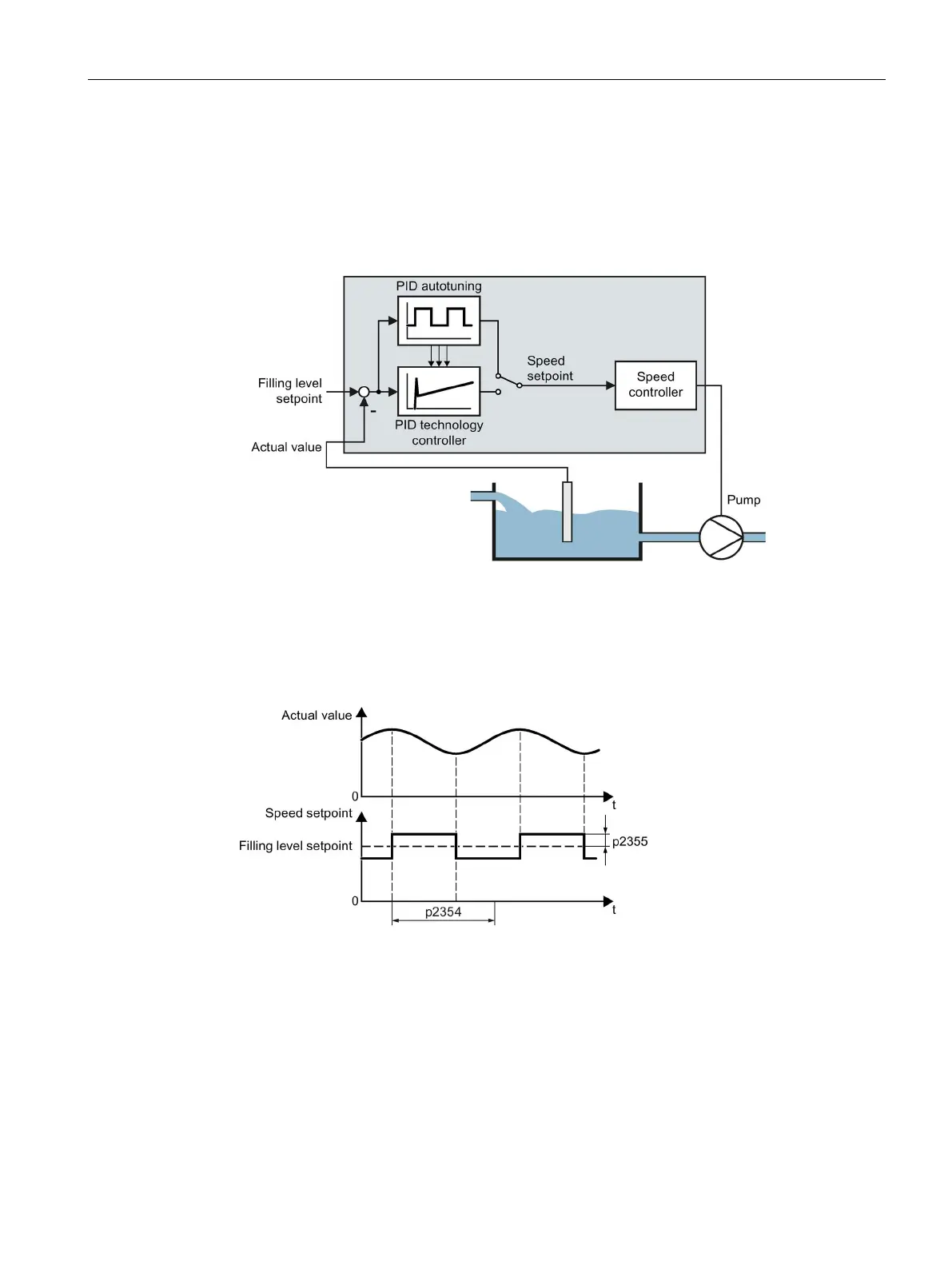
Autotuning of the PID controller
Autotuning is an inverter function for the automatic optimization of the PID controller.
For active autotuning, the inverter interrupts the connection between the PID controller and
the speed controller. Rather than the PID controller output, the autotuning function provides
the speed setpoint.
Image 6-56 Autotuning of the PID controller using the example of a filling-level control
The speed setpoint results from the technology setpoint and a superimposed rectangular
signal with amplitude p2355. If actual value = technology setpoint ± p2355, the autotuning
function switches the polarity of the superimposed signal. This causes the inverter to excite
the process variable for an oscillation.
Image 6-57 Example for speed setpoint and actual process value for autotuning
The inverter calculates the parameters of the PID controller from the determined oscillation
frequency.