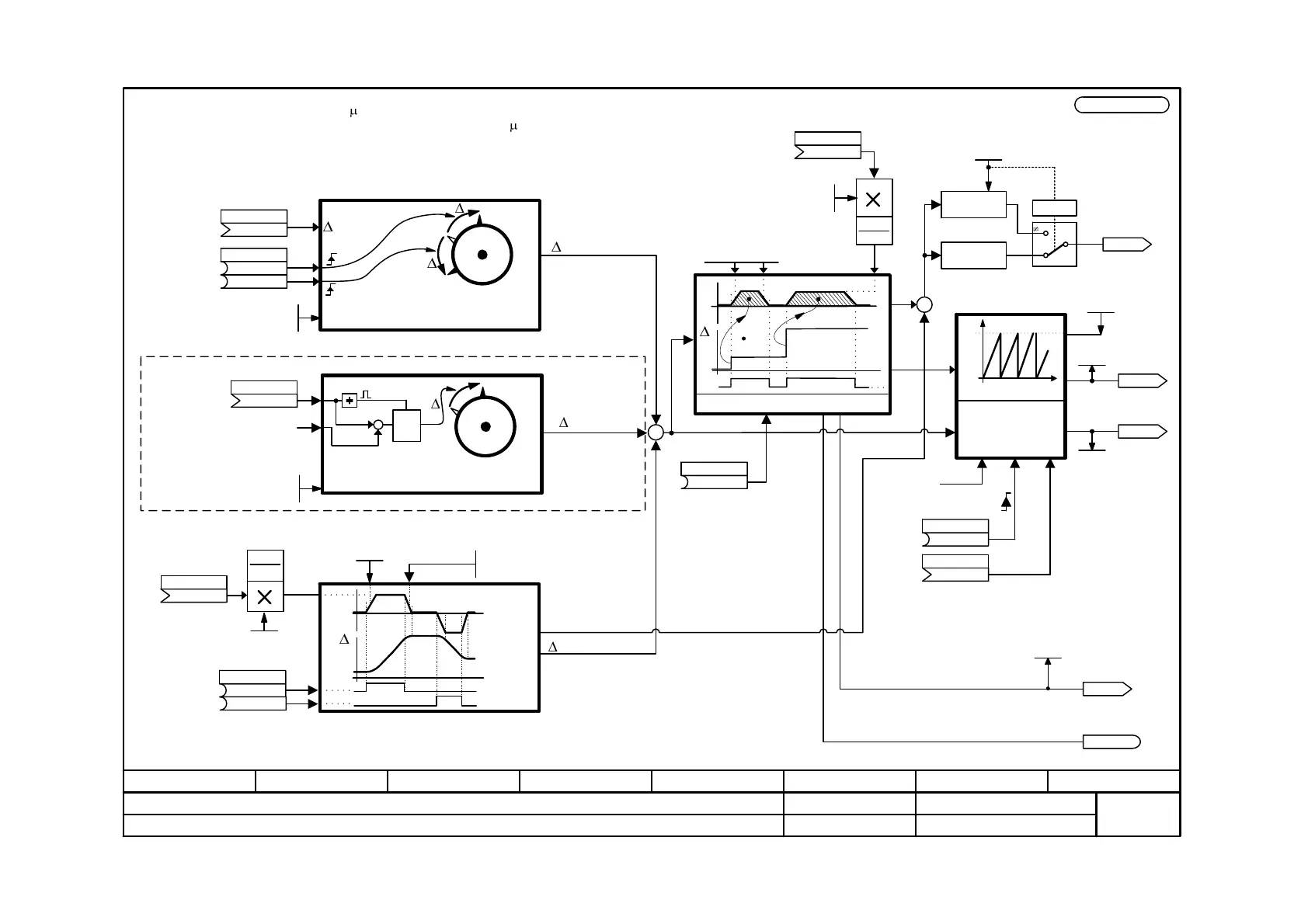
Function diagram
87654321
fp_mc_794_d.vsd
Free blocks
MASTERDRIVES MC
14.10.2010
Additive Relative/Absolute Offset Angle Setting
-794 -
V2.5
s_relative
SET
SET
VALUE
RESET
POWER ON
t
t
v
s
Compensation motion
x1
x2
x1 x2
100%
*
Add. offset [LU]
Additive offset angle, relative
s_set_slave
[KK835]
.01
.02
Start +
Start -
Integrator with
ACL limiting
Scaling to
MD23
Scaling to
U825.3
U825.3
{Calculating time in no-load status: 31 s}
{Calculating time during compensation movement after start +/-: 69
s}
Inching offset angle
t
t
v
s_Inching
.03
.04
Inch +
Inch -
v_Inching
s
x1
x2
x1 x2
100%
*
+
+
+
+
U953.51=___ (20)
KK0834
Current offset
(for monitoring or non-
volatile storage by
means of tracking/
memory element [760] )
KK
U821.02 (0)
Offset setting value
(e.g. of tracking/memory
element [760])
B
U827 (0)
Set offset
KK
U824 (1)
Factor [%]
KK0833
Additive residual offset
B0840
Additive positioning active
KK0835
KK
U821.1 (0)
Additive, relative offset angle
B
U822 (0)
n826.3
ACL
0 - 2
31
U820 (4096)
n826.1
KK0832
Displace speed [%]
Setting speed
0.00 ... 20 000 000.00 [1000 LU/min]
U825.2 (60000.00)
Nominal speed
0.00...20.000.000.00 [1000 LU/min]
U825.3 (0)
B (1)
U819
Enable positioning
B
U822 (0)
KK
U824.2 (1)
Factor [%]
Acceleration
0.00...20 000 000.00 [1000 LU/s2]
U825.5 (0)
Mode additive,relative
Offset angle setting
0 = Additive
1 = Delete residual offset
U823.1 (0)
n826.2
B
B
Deceleration
0.00...20 000 000.00 [1000 LU/s
2
]
U825.6 (0)
Adjusting speed
0.00...20 000 000.00 [LU/min]
U825.4 (60000.00)
Acceleration
0.00 … 20 000 000.00 [1000 LU/s
2
]
U825.1 (0)
Displacement angle absolute
during change of values
Memory
+
-
SET
<1>
<1> Limited to axis cycle
s.set_Slave
[KK835]
Current displacement KK834
s_absolute
KK
U821.03 (0)
Absolute displacement angle
Operating mode of correction
0 = shortest distance
1 = as specified (new value >
old value => pos. direction)
U823.2 (1)
0
0
+
P
IL
O
T
V
E
R
S
IO
N
2.5
 Loading...
Loading...









