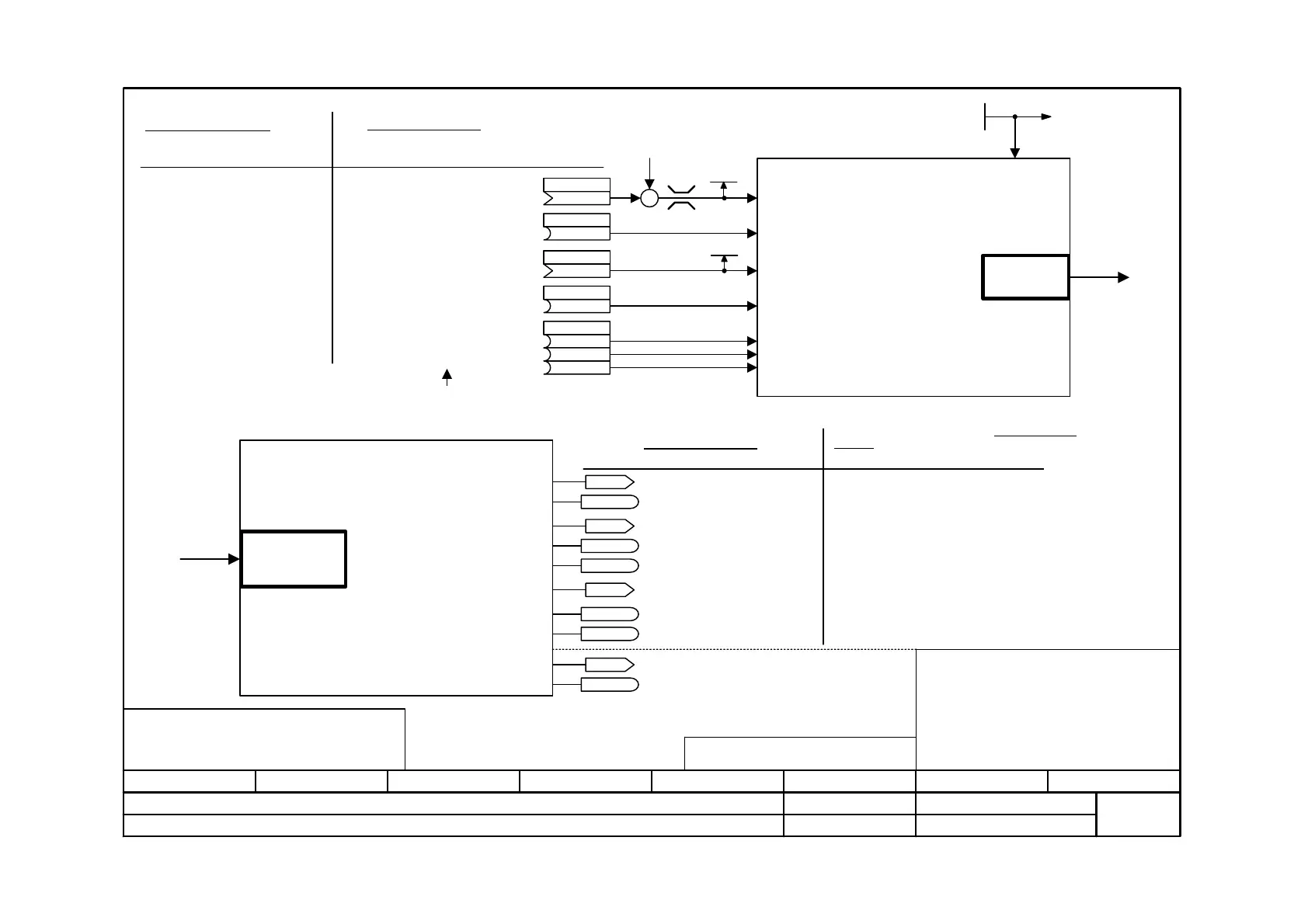
Function diagram
87654321
fp_mc_815_e.vsd
Technology option
MASTERDRIVES MC
14.10.10
Evaluation and control of position sensing
-815 -
Parameterization required when an
external machine encoder
[335] is
used for position sensing ("direct
position measuring system")
U535 = 125 [335.8]
U529 = 71 [255] [270]
U539 = 127 [335.7]
U538 = 217 [335.7]
U537.02 = 215 [335.7]
Parameterization required when the
motor encoder in slot C
[330] is
used for position detection:
U535 = 120 (---) [330.8]
U529 = 70 (WE) [230] [240]
[250] [260]
U539 = 122 (---) [330.7]
U538 = 212 (WE) [330.7]
U537.02 = 210 (WE) [330.7]
+10
9
-10
9
.01
.02 (210)
.03
Evaluation of position sensing
Position actual value
Position actual value O.K. (alarm A135 if not O.K.).
Position measured value from position memory
Acknowledgement "Position measured value valid"
to the operating modes
Position signals
[817.1]
Simulation mode
<4>
Only for testing purposes
Reference point detected
Only for testing purposes
<4> To activate / deactivate the simulation mode, the
command [RST] "Reset Technology" must be
additionally issued or the electronics power supply
must be switched off / on.
Control signals for
position sensing
Control of position sensing
(WE) = "This parameterization has
already been carried out in
the factory setting."
<2> Complete revolutions in the encoder
(e.g. P146 [260.3]), parameterize offset within a
revolution via MD10.
<3> The technology limits the position actual value to
the range -999 999 999 ... +999 999 999
(position sensing system supplies -2
31
... +2
31
)
from the operating modes
<1> See also note <3> on sheet [836] regarding
pos. sensing during synchronous operation.
Pos. setting value
Set position
Position correction value
Correct position +
Correct position -
Position offset
Enable meas. value memory
Enable ref.-point detection
Parameterization required when the
motor encoder in slot C
[330] is used
for position sensing::
P172 = 302 (---) [330.5]
P173 = 302 (WE) [330.5]
P174 = 301 (---) [330.5]
P175.01 = 303 (WE) [330.5]
P175.02 = 304 (WE) [330.5]
P184 = 303 (---) [330.7]
P179 = 308 (WE) [330.5]
P177 = 307 (WE) [330.7]
<1>
P155.01 = 302 [335.5]
P156.01 = 302 [335.5]
P157.01 = 301 [335.5]
P158.01 = 303 [335.5]
P158.02 = 304 [335.5]
P167.01 = 303 [335.7]
P162.01 = 308 [335.5]
P160.01 = 307 [335.5]
Parameterization required when an external machine
encoder [335] is used for detection ("direct position
measuring system"):
(At the present time, always set to = 0 of
absolute-value encoder is used)
<3>
<2>
Offset for
absolute-value
encoder
MD10
+
+
Position correction value, external encoder
Correct position, external encoder
V2.5
KK
U535 (0)
B
U529 (70)
KK
U539 (0)
B
U538 (212)
B
U537
n540.09
KK0302
B0302
KK0301
B0303
B0304
KK0303
B0308
B0307
KK0306
B0306
n540.03
1 = Simulation mode On
2 = Simulation mode Off
U503 (2)
B
B
 Loading...
Loading...









