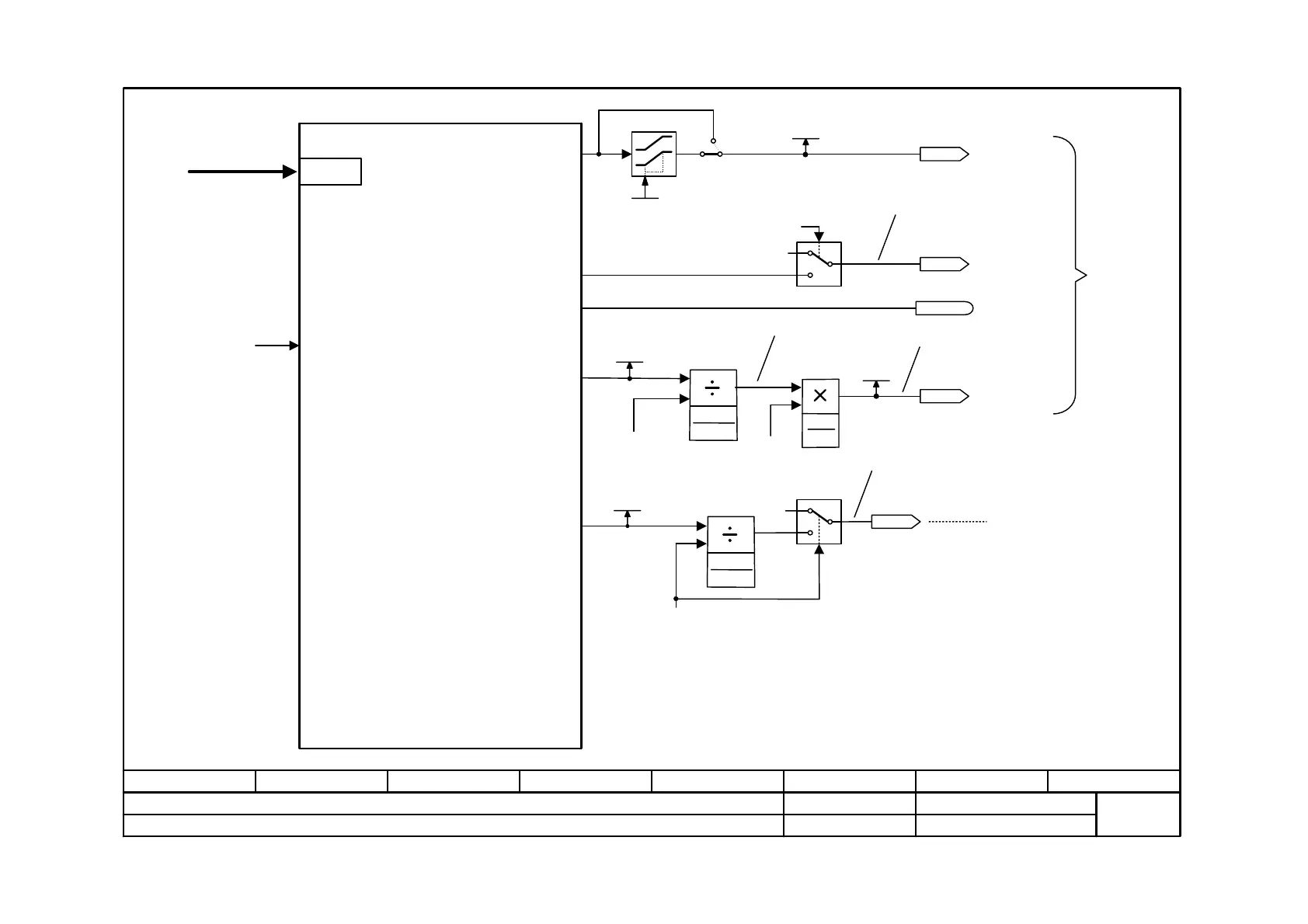
Function diagram
87654321
fp_mc_817_e.vsd
Technology option
MASTERDRIVES MC
02.02.04
Setpoint output and enabling
-817 -
Setpoint output and enabling
from the operating modes
Setpoints
is not effective during synchronism (MODE_OUT=11)
Pos. setpoint
0
>0
Op. mode [811]
MODE_OUT
Speed setpoint for the speed-
controlled operating modes,
controlling, homing procedure and
synchronous operation
1 = Enable "Control" for op. modes
controlling and homing procedure
0 = Enable position control <1>
Speed precontrol value x3
MD23 (12 288)
0...19 999 999 [x 1000 LU/min]
Max. velocity
MD49 (0)
0...150%
Evaluation factor
x1
0
>0
0%
<3>
Acceleration compensation value
MD50 (0)
1...99 999 [x 1000 LU/s
2
]
0 = Acceleration precontrol inactive
Evaluation factor ("rated acceleration")
[815.8]
Simulation mode
x
y
Jerk limitation
y
0%
[% from P353] [20]
x1
x2
x4
y
[% from MD23]
[% from P353] [20]
[% from P354] [20]
<1> Precondition: P210 = P211 = 1 [340.3] [806]
<2> n540.10 is not functioning if synchronous operation has
been inserted as a free component
<3> Acceleration precontrol is not output during
synchronous operation
x2
*
100%
x3 x4
*
x1 100%
x2
x1 100%
x2
x
to position controller
[340]
to calculation of acceleration
torque [398]
V2.5
Rounding time constant
0...1000 ms
U505 (0)
KK0310
P190 = 310 [340.1]
(factory setting)
K0311
P212 = 311 [340.7]
(factory setting)
B0305
P213 = 305 [340.3]
(factory setting)
<2>
[x 1000 LU/min]
n540.10
KK0312 P209 = 312 [340.7]
[x 1000 LU/s2]
n540.37
KK0313
[% x 0.01]
n540.38
n540.01
 Loading...
Loading...









