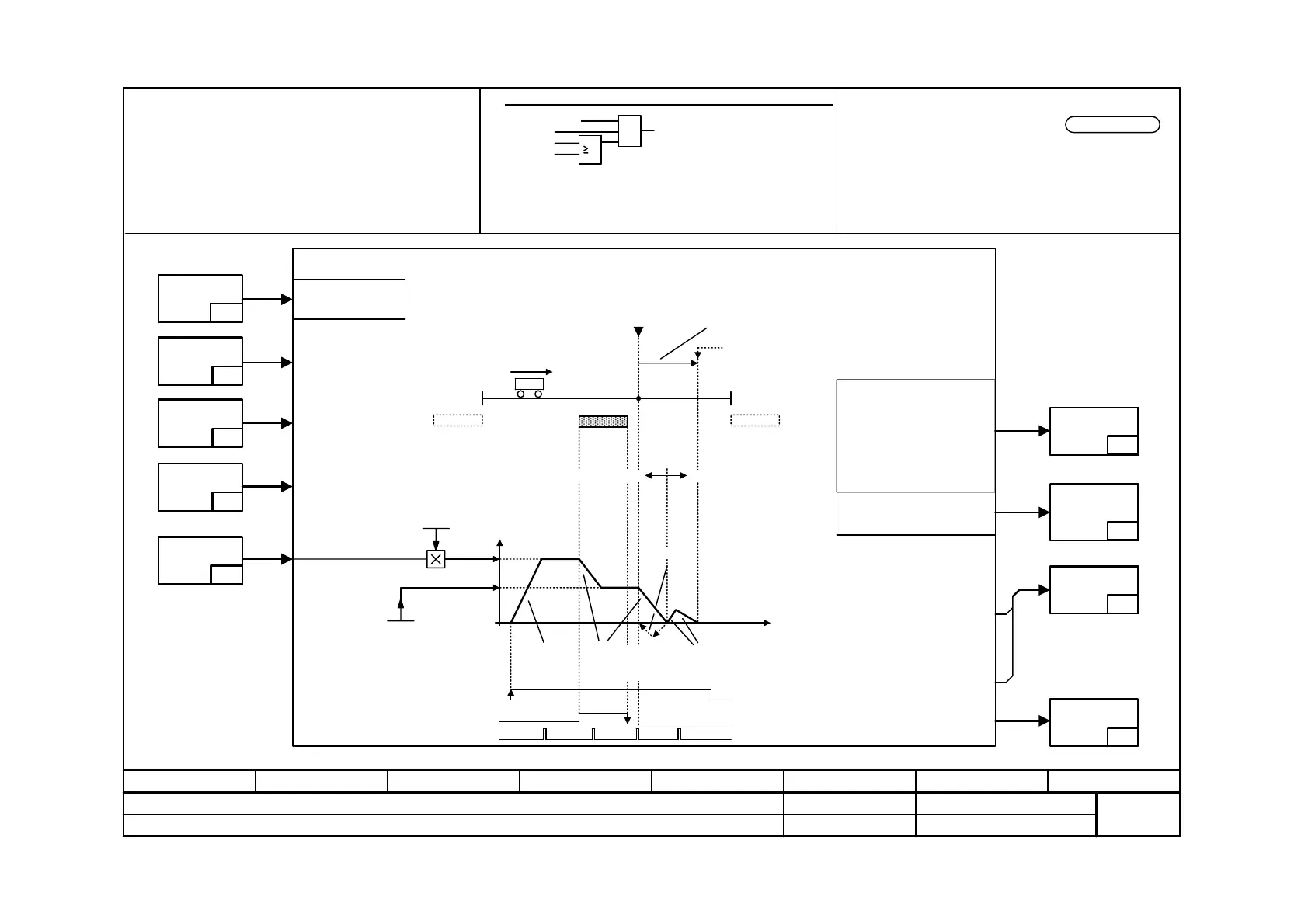
Function diagram
87654321
fp_mc_821_e.vsd
Technology option
MASTERDRIVES MC
08.01.02
Homing procedure operating mode
-821 -
Positioning output
signals
Sampling time for positioning
Recommended: U953.32 = 4
<1> The homing position direction of approach in MD5 must correspond
to the parameterization of position sensing (e.g.. P183 if the motor
encoder is used in slot C [330.2]), i.e.:
MD5 = 1 ==> increasing positions from A to B ==> P183 = xx1x
MD5 = 2 ==> decreasing positions from A to B ==> P183 = xx2x
<2> If the technology option F01 in MASTERDRIVES MC is used, the
"Homing position setting value" in position sensing (e.g. P176 [330]) is
not required
<3> The BERO must be adjusted mechanically or via P188 [330.2] such
that the falling edge of the BERO signal does not fall together with
the encoder zero position (e.g. as can be observed at KK090 [550])
<4> Special case MD5=3: Directly set homing position without approach:
<5> Acceleration/deceleration times MD41/42 refer to a traversing
action from 0 to MD23 or from MD23 to 0.
<6> Homing with automatic reversal
at reversing cam right and/or left, see [813.4]
Control bits
[809]
Positioning input signals
Operating Mode
[809]
Position signals
[815]
[J_FWD] forwards
[J_BWD] backwards
2 = Operating mode
Homing procedure
Homing position
sensed
Digital inputs for
positioning
[813]
BERO signal (with
MD45 [813.4] and
P178 [330.5]
determined)
Homing Procedure operating mode
-999 999 999 ... 999 999 999 LU
Home position
coordinate
MD3 (0)
Direction of
approach
MD5
A
B
<4>
<1>
Home positon
displacement
MD4 (0)
[ST_EN] Start enable
[FUR] Processing runs
[DRS] Destination reached
and stationary
[FWD] Forwards
[BWD] Backwards
[FUT] Function finished
[ARFD] Axis is homed
Position control
Speed
Override
[809]
Set actual value to
MD3 here
- Homing procedure enable
BERO
range
Speed control
MD4 = 0
<5>
MD41 (1000)
1...99 999 ms
Accel Time
MD42 (1000)
1...99 999 ms
Decel Time
<3>
J_FWD or J_BWD
Rough pulse
Rotor zero position
MD18 / 19 (1000)
1 ... 99 999 [x 1000 LU/s
2
]
acceleration / deceleration
position-controlled
v*
a*
v*
s
Status bits
[811]
[815]
Control signals
for position
sensing
Setpoints
[817]
Diagnostic data
[818]
V2.5
Reversing cam Reversing cam
<6> <6>
&
[MODE_IN] = 2
MD5 = 3
[J_FWD]
[J_BWD]
1
Set position setpoint and
actual value to MD3
(Beforehand, traverse
through any displacement
path MD4 with speed MD6)
Special case: Bero and rotor zero position (as shown)
Special case: Homing with bero only: MD8 = 1
Special case: Homing with rotor zero position only or
zero pulse only: MD8 = 2
U953.32 = ___(20)
Approach speed
MD7 (5000)
1 ... 19 999 999 [x 1000 LU/min]
MD6 (500)
Reducing speed
1 ... 19 999 999 [x 1000 LU/min]
 Loading...
Loading...









