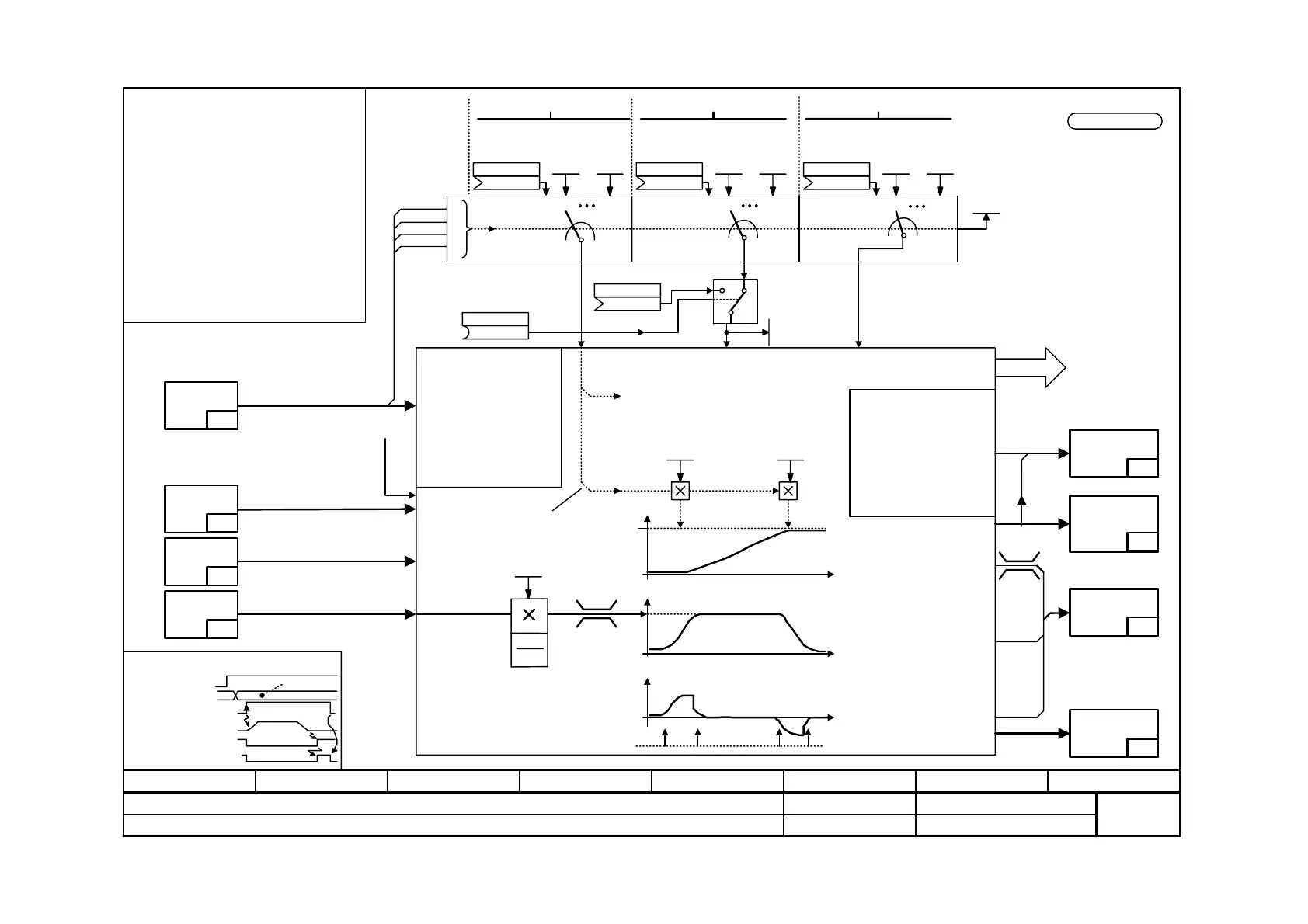
Function diagram
87654321
fp_mc_823_e.vsd
Technology option
MASTERDRIVES MC
08.01.02
Operating mode MDI (point-to-point positioning)
-823 -
<1> 00= "Travel shortest distance" with round
axis with G90
<2> [LU]=the length unit set by the actual value
evaluation factor (e.g. P169/P170 [330.4] with
motor encoder in slot C) e.g. 0.001 mm
<3> - High Byte = first G function:
90=Absolute dimension (with round axis
modulo MD11)
91=incremental dimension (relative, with
round axis no modulo function)
- Low Byte= second G function=
acceleration override:
30=100%, 31=10% ... 39=90%
Number representation: parameter decimal
coded hexadec. in connector, example:
absolute positioning with 100% acceleration
==> Parameter = 9030 (dec.;= factory setting)
==> Connector = 5A1E (hex)
Positioning output signals
"Normal" control frequency for travel action
[OFF1] AUS1
[MODE_IN]
[STA] Start
Speed
[DRS] Pos. reached
[FUT] Function finished
3
[J_FWD] Forwards <1>
[J_BWD] Backwards <1>
[RST] Reset technology
[FUM] Follow-up mode
[CRD] Cancel remaining
distance
[STA] Start pos. travel
[RIE] Read-in enable for
roll shift
[TGL_I] Toggle bit input for
"flying MDI"
Override
[809]
0 ... 255 %
Position
signals
[815]
Operating
mode
[809]
Time override MD26
Backlash compensation MD38 ... MD40
Operating mode MDI positioning
90 / 91 = absolute/relative
positioning
[ARFD] Axis is referenced
[OTR] Limit switch reached
[FUT] Function finished
[BWD] Backwards
[FWD] Forwards
[DRS] Pos. reached and
stop
[FUR] Processing runs
[ST_EN] Start enable
[TGL_O] Toggle output
Accelerate -
override
Jerk limiting (see [817])
t
t
t
s*
v*
a*
Ovr.
100%
F Ovr
*
3 = operating
mode MDI
Position
Speed
Acceleration
v_end
[823.5] X
Sampling time for positioning
Recommended: U953.32 = 4
Position setpoint s*
Speed pre- control value
Acceleration
pre-control value
MD23
MD13
MD12
Software
limit switch
v*
a*
[OTR]
G
0
1
<3>
G functions
2
3
2
2
2
1
2
0
Selection of
MDI set 0 ... 10
90 30 ... 91 39
(90 30)
Position (X)
<2>
-2
31
... +(2
31
-1) [LU]
0 1 10 0 1 10
X
Speed (F)
0 1 10
0 ... 1 999 999 900 [x 10 LU/min]
(but limited to MD 23)
F
MDI block number 0...10;
Following is displayed:
- at standstill: selected MDI block
- during travel: currently traversed
MDI block
- no MDI mode ==> display "0"
at MD1 = 3
Set specification for
roll shift [830]
30 = 100 %
31 = 10 %
32...39 = 20...90 %
Bit 11
Bit 10
Bit 9
Bit 8
[MDI_NO]
MDI set number
(Positioning control bits 8 ... 11)
Positioning input signals
Control bits
[809]
[815]
Control signals
for position
sensing
Setpoints
[817]
Diagnostic data
[818]
Status bits
[811]
V2.5
Acceleration
MD18 (1000)
1 ... 99 999 [x 1000 LU/s2]
Deceleration
MD19 (1000)
1 ... 99 999 [x 1000 LU/s2]
[823.6]
F
U953.32 = ___(20)
B
U509 (0)
KK
U534 (0)
K
U531 (0)
5A1E ...
5B27 hex
U550.1 U559.1
KK
U532 (0)
U550.2 U559.2
KK
U533 (0)
U550.3 U559.3
n540.13
n540.12
 Loading...
Loading...









