Function diagram
87654321
fp_mc_833_e.vsd
Optional free block
MASTERDRIVES MC
02.02.04
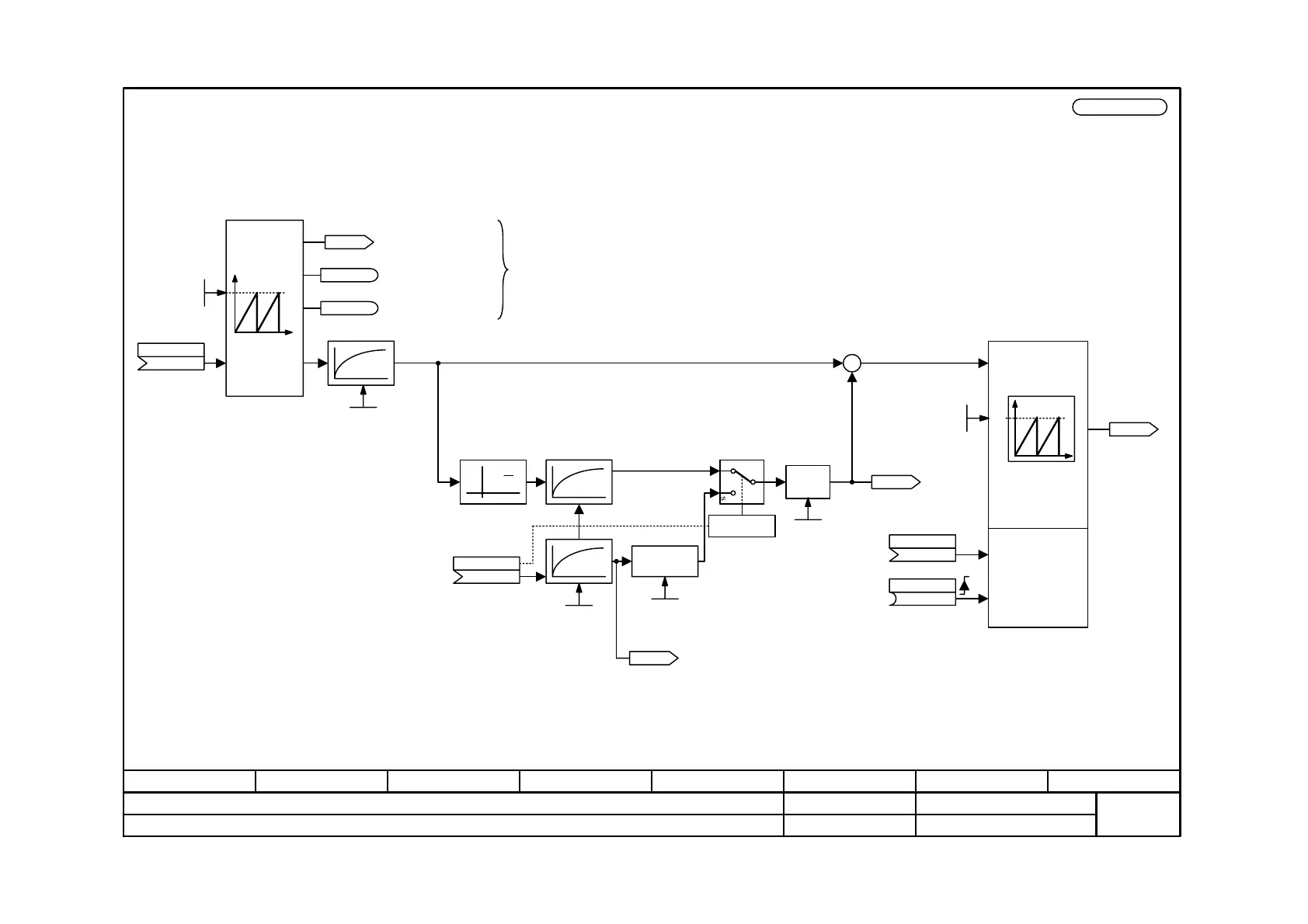
Synchronism - real master with deadtime compensation
-833 -
V2.5
Position set-point
master axis to
synchronism
block e.g
U600.01 = 608
[834.1]
Position actual-value
of the real master
e.g. from "position sensing
external encoder"
(U422.01 = 125 [335.8] )
from position sensing
external encoder
e.g. U422.03 = 129 [335.7]
Real master with speed-dependent deadtime compensation
<1> Typical setting values for U424 depending on the master value source:
- approx. 3 ms with external machine encoder
- approx. 6 ms with motor encoder
- approx. 10 ms if input value is coming from SIMOLINK
<2> It is recommended to use the measured actual speed if possible
(U422.03>0)
<3> You can normally set the axis cycle lengths U425.1 and U425.2 to the
same value.
<3>
d
dt
Deadt.
comp.
Should be calculated in the same
time slot as the synchronization
block.
Integrator with ACL limitation
AZL
SET VALUE
SET
+
+
AZL
<3>
<2>
=0
0
U422.03
Normalization
Normally to "position sensing
external encoder", if limitation
should be effected to axis cycle
[335.5]
P158.01 = 582
P158.02 = 581
P157.01 = 614
U953.31 = ___(20)
KK0609
Output
deadtime
compensation [LU]
KK0608
Position setpoint
[LU]
Axis cycle length
output
0 ... 2
31
-1 [LU]
U425.1 (0)
B
U426 (0)
Set
KK
U422.02 (0)
Setting value
Axis cycle length
Input
0 ... 2
31
-1 [LU]
U425.2 (0)
KK0614
Position correction value
B0582
Position correction +
B0581
Position correction -
KK
U422.01 (0)
Input value [LU]
Smoothing time input signal
0 ... 100 ms
U423 (0)
Smoothing deadtime compensation
0 ... 100 ms
U427 (0)
KK
U422.03 (0)
Actual speed [%]
KK0624
Speed
setpoint [%]
Rated control speed
0.00 ... 20 000 000.00 [1000 LU/min]
U428 (0)
Deadtime
compensation
<1>
0.00 ... 100.00 ms
U424 (0)
 Loading...
Loading...









