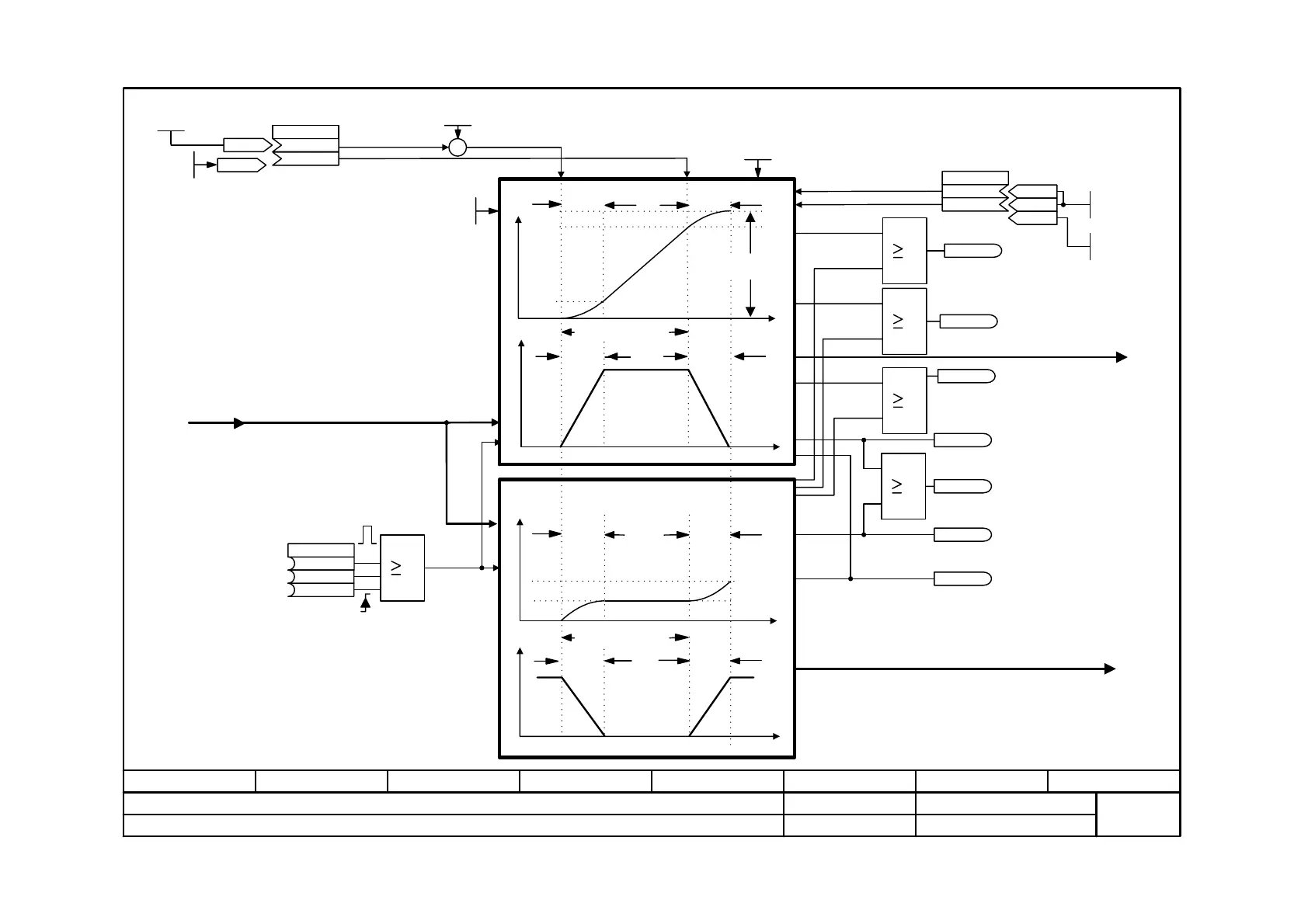
Function diagram
87654321
fp_mc_834b_e.vsd
Technology option
MASTERDRIVES MC
02.02.04
Synchronism - engaging/disengaging actions catch-up (variable ramps) U475 = 11 from V2.1
- 834b -
V2.5
1
<1>
<2>
[SSC] Permanent enable
0.1
0.2
Single enable [SST]:
After a positive edge, engaging/disengaging is carried out once.
[LU]
+
+
[LU]
[834.3]
Ramp inactive (in constant travel phase)
(=1 during time span of (B) .. (C))
1
Engaging is running
(=1 during the time span of (A) .. (D))
Engaging/disengaging is running
(=1 during the time span of (A) .. (D))
Disengaging is running
(=1 during the time span of (A) .. (D))
[834.5]
[834.5]
ENGAGING
s_slave
s_master
v_slave
ACC-RA
DEC-RA
s_master
ACC-RA
DEC-RA
DEC-
RA/2
Disengaging
s_master
s_slave
ACC-RA
DEC-RA
s_master
v_slave
ACC-RA
DEC RA
DEC-RA/2
ACC-RA/2
0.3
[SST] Single enable
Permanent enable continuous
.01 (822)
Src Disengage Position
Only one of the two permanent enables can be given. If the permanent
enable signal is given, engaging/disengaging action is performed every time
the engaging position is reached again.
The engaging/disengaging action must be completed at the latest in the
greatest possible axis cycle of the ACL max master axis in order to already
recognise the next engaging position again in the following ACL.
If the permanent signal is output continuously the engaging/disengaging
action is only performed once when it first reaches the engaging position.
After this, the drive remains engaged or disengaged respectively.
Special configuration U475 = 11 and U601 > 0 (Variable Ramps):
Acceleration ramp and deceleration ramp can be adjusted independently of
each other.
The position at which the constant travel phase of engaging/disengaging is
finished is determined exclusively by the disengaging position.
The engaging/disengaging length is not taken into account, but it must be
set greater than the desired total length of the acceleration/deceleration
ramp.
<3>
1
Decel. ramp
DEC-RA [LU]
Acc. ramp
ACC-RA [LU]
1
1
<1>
<2>
The deceleration ramp can be changed during operation to
maximum the position of the disengaging position (C).
[LU]
(B)
(C)
(D)
<5>
<5>
(C) -(B) + ACC-RA/2
+ DEC-RA/2
(A)
(A)
(B)
(C)
(D)
ACC-RA/2
<6>
DISENG = U609.2
ENG = U609.1 + U608
DISENG - ENG <6>
DISENG - ENG <6>
<4>
0: Standard configuration
1: Special configuration (specified disengaging position)
11: Special configuration (specified disengaging position + variable
acceleration/deceleration ramp) from version 2.1
111: Special configuration (as 11 + peak travel (C) < (B))
from version 2.2
<3>
.01 (894)
.02 (894)
B
U612 (0)
Enable
Engaging/Disengaging
KK0822 KK
U609
Src Offset
Couple Position
B0832
B0833
B0831
B0803
B
KK
.02 (821)
Config.Eng/diseng
0 ... 111 (0)
U475
B0814
Change to Src.Variable Ramps (U474) permitted
(=0 Change during time span of (A) .. (B)
and (C) .. (D) not permitted)
KK
U474
Src Variable Ramps
KK0894
KK0894
Total length of
acceleration/dec.
ramp
U610.1 (1) [LU]
KK
B0802
In deceleration ramp
(=1 during the time span of (C) .. (D))
B0801
In acceleration ramp
(=1 during the time span of (A) .. (B))
Length of
ramp
U610.2(0) [LU]
KK0895
TG FK ramp
KK0821
Diseng.pos.
U613.2 (0)
Couple Position
U608 (0) [LU]
Offset
Couple Position
U613.1 (0)
B
<4>
Engaging/disengaging length
U611 (0) [LU]
 Loading...
Loading...









