02.2004 Communication / CBC CANopen Communication Board
Siemens AG 6SE7087-6QX70 (Version AD)
SIMOVERT MASTERDRIVES Compendium Motion Control 8.5-127
87654321
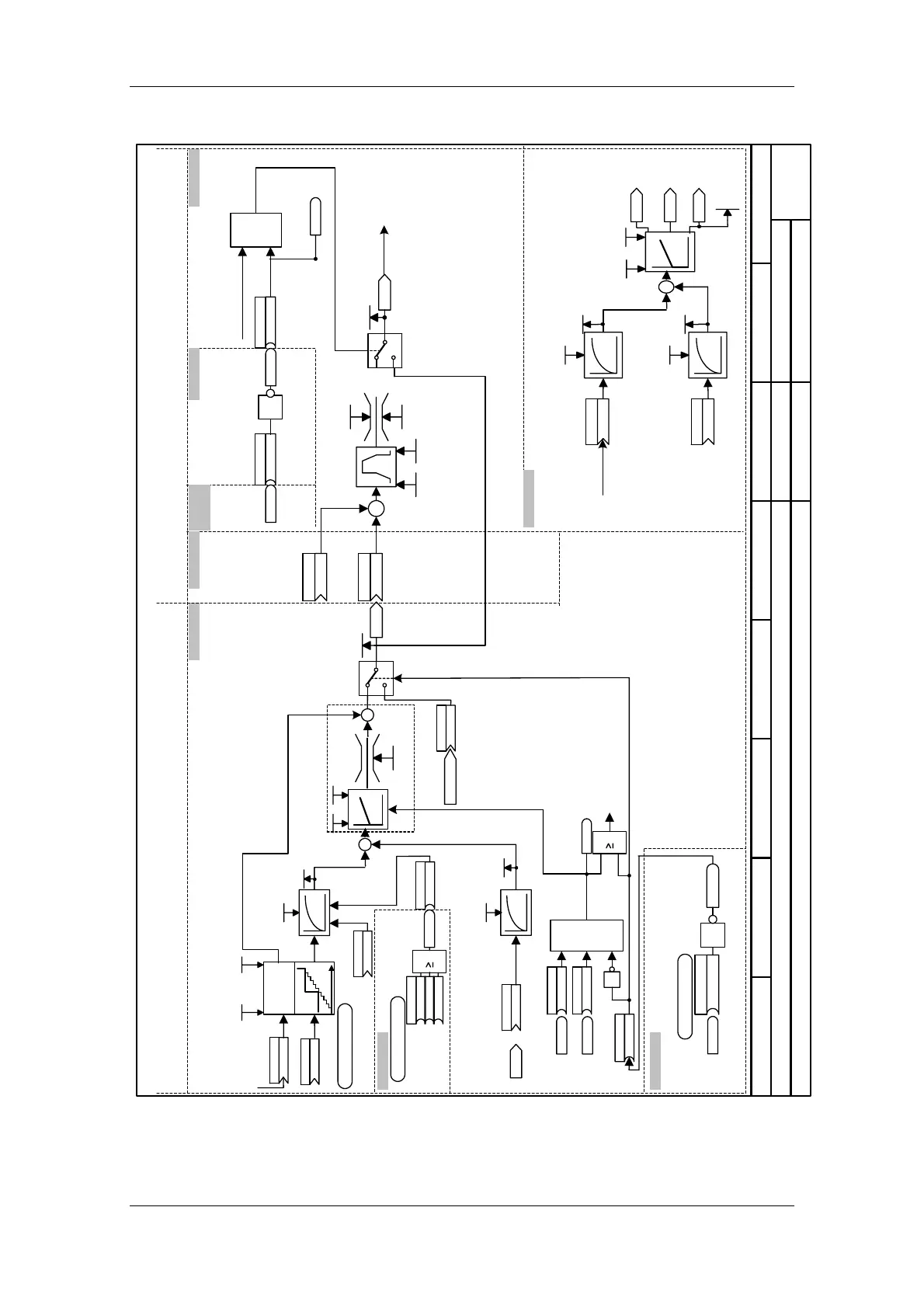
Overview: Interconnections for CANopen
MASTERDRIVES MC
24.11.03
MASTERDRIVES MC with B-Pos
- 8520 -
from V1.5
Speed controller
+
–
P220.B(75)
KK
Src n(set)
Smooth n/set)
0.0 ... 100.0 ms
P221.F (0.0)
P222 (91)
KK
Src n(act)
Smooth n(act)
0.0 ... 100.0 ms
P223 (0.0)
[rev/min]
n(act,smooth)
r230
[min
-1
]
n(set,smooth)
r229
K0154
n-Reg (P comp.)
K0155
n-Reg (I comp.)
K0153
M(set,n-Reg.)
M(set,n-Reg.)
r255
n-Reg. Tn
0 ... 1000 ms
P240.F (50)
n-Reg. Kp1
0.0 ...1000.0
P240.F (10.0)
Sheet [340]
Position controller
1
B0649
U259 (0)
B0877
KK0131
+
–
Smooth Pos Set
0.0 ..1000.0 ms
P191.F (0.0)
P194 (120)
KK
Src Pos ActV
ActPos Smoothing
0.0... 1000.0 ms
P195 (0.0)
Pos ActV
PosReg
r201
PosSetp
r200
Pos RegTn
0 ..10000 ms
P206.F (0)
Pos Reg Kv
0.000..20.000
P204.F (0.100)
[LU]
P190 (310)
KK0882
Src PosSetp
Position
setpoint
interpolator
t
Transmission raio-
sampling time
-8 ... 8
P770 (3)
Max. jump for
interpolation
0 ... (2
31
-1)
P771 (0)
Ü=2
P770
[LU]
Pos Reg Output
r214
P202.B (134)
PosReg Limit
0
1
+
+
P209 (312)
KK0881
PRE PosReg
P212 (311)
KK
Src Ctrl Setp
P213 (305)
B0649
Src Release Ctrl
1
&
P211 (104)
B
Src2 Rel PosReg
P210.B (0)
B
Src1 Rel PosReg
B0220
Pos Reg Enable
Enable
This block is calculated
only after enabling.
1
Enable RFG bypass
by position control [320.6]
Setpoint channel
P443.B
KK
Src MainSetpoint
P433.B (0)
KK
SrcAddSetpoint 1
Sheet [320]Sheet[310]
Reference
frequency: P352
Speed: P353
Torque: P354
P462.F (10 s)
Accel Time
P464.F (10 s)
Decel Time
P453.F (-110,0%)
n(max,REVSpeed)
n(max,FWDSpeed)
P452.F (110.0%) *
)
0
1
Position controller output [340.8]
n/f(setp)
r482
KK075
from setpoint channel
Sheet 320
Sheet [360]
to speed controller
Sheet 360
B0877
BPos Set
PSR
Sheet [770]
B0648
Mode In
Control
inverted
Enable RFG bypass
by pos. control [340.5]
B0205
Position controller enable
by RFG bypass
&
P772 (1)
B
SrcEnRGenByp
U258 (0)
B
Mode In
Control
inverted
B3212
Profile
Velocity
Mode
Sheet
[765]
1
V-Setpoint SDO/PPO
B0104
Operation
B0877
BPos Set
PSR
U923.53 = 4 (20)
KK0120
Pos ActV
P192 (0)
KK0120
Src SetV PosSet
P193.B (0)
B0628
Src Set PosSetp
B06281
U248 (0)
B3200
B0105
B0000
U952.40 = 4 (20)
U953.40 = 3 (3)
KK0418/30xx
Sheet [765]
B-Pos PosSetp
B-Pos V-Setpointt
Sheet [770]
HM35 set position
No operation
 Loading...
Loading...









