02.2004 Communication / CBC CANopen Communication Board
Siemens AG 6SE7087-6QX70 (Version AD)
SIMOVERT MASTERDRIVES Compendium Motion Control 8.5-129
- 8522 -
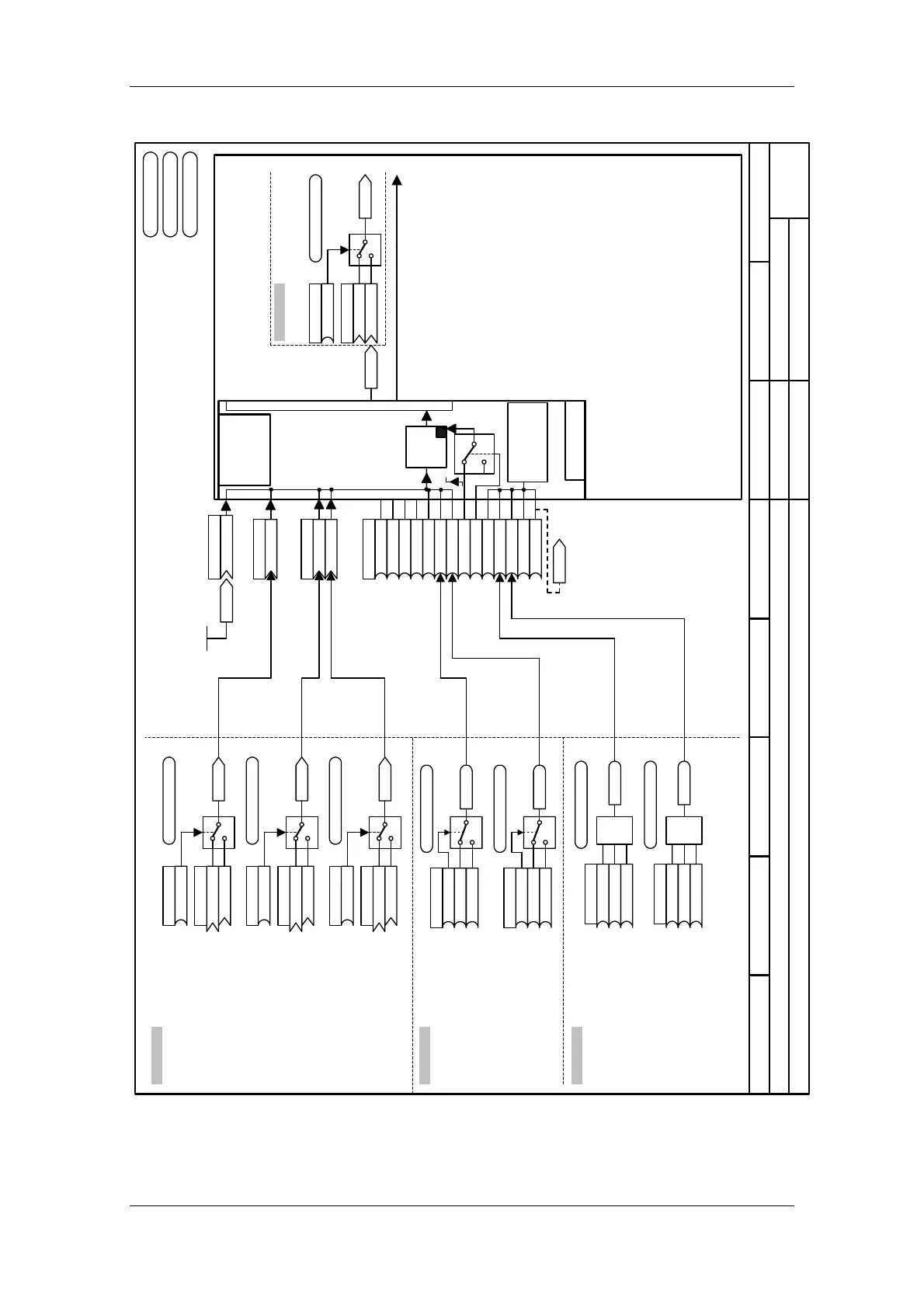
Function diagram
87654321
Basic positioner overview
MASTERDRIVES MC
01.10.01
MASTERDRIVES MC with B-Pos
from V1.5
U867 (879)
KK879/30xx
Positioning setpoint [LU]
K 0524
B 3106
B 0664
B 0665
B 3209
B 0625
B 0626
B (888)
B (887)
FD 789a
B 3213
B 3214
B 3215
B 3104
B 3208
Sequ. control
during possible
ref.travel
KK879
Set/Setp
acceptance
U868 (876)
KK
Speed setpoint [%]
U869.1...2
K 0523
Acceleration setpoint[%]
.01
.02
U866.1...14
B 0001
Control word
.01
.02
.03
.04
.05
.06
.07
.08
.09
.10
.11
.12
.13
.14
0
1
1
U953.60 = 04 (20)
U953.61 = 04 (20)
U953.62 = 04 (20)
Setpoint
acceptance,
mode
management
Mode
management
e.g.:
REF
(referencing/
homing)
POS
(positioning)
SETUP
(setting up)
K886
n870.1
/ 0 to 13
(Recomm.: U953.6x=4 )
.01
U182 (0) U951.77 = 04 (20)
KK0529
KK 416/30xx
U183 (0)
B 3215
.02
KK 0876
0
1
Homing Mode
V-Set PPM/SUM(SDO/PDO)
V-Set HM
.01
U170 (0) U951.21 = 04 (20)
K0523
K 0877/3xxx
U171 (0)
B 3215
.02
K 0406
0
1
Homing Mode
Accel. PPM/SUM(SDO/PDO)
Accel. Setpoint HM
.01
U172 (0) U951.60 = 04 (20)
K0524
K 0878/3xxx
U173 (0)
B 3215
.02
K 0406
0
1
Homing Mode
Decel. Setpoint (PPM/SUM)
Decel Setpoint HM
U274 (0)
U951.65 = 04 (20)
B 3215
B0664
B 3111
B 0882
.01
.02
.03
0
1
Homing Mode
D-FWD
F-BWD from B-Pos
U275 (0)
U951.96 = 04 (20)
B 3215
B0665
B 3112
B 0883
.01
.02
.03
0
1
Homing Mode
D-BWD
D-BWD from B-Pos
U245 (0)
U951.93 = __ (20)
≥1
B 0000/0018
B0625B 0000/0010
B 0000
.01
.02
.03
Dig IN5
Dig IN1
U246 (0)
U952.10 = __ (20)
≥1
B 0000/0018
B0626B 0000/0012
B 0000
.01
.02
.03
Dig IN5
Dig IN2
KK874
.01
U184 (0) U952.08 = 04 (20)
KK0530
KK 0000
U185 (0)
B 3202
.02
KK 0874
0
1
to [8523]
U874.1 (0)
Fixed connector
pos. setpoints
to [8523]
Sheet [750]
Sheet [770]
Sheet [765]
Sheet [750]
 Loading...
Loading...









