08.2012 Technology Option F01
Siemens AG 6SE7087-6QX70 (Version AN)
SIMOVERT MASTERDRIVES Compendium Motion Control 9-145
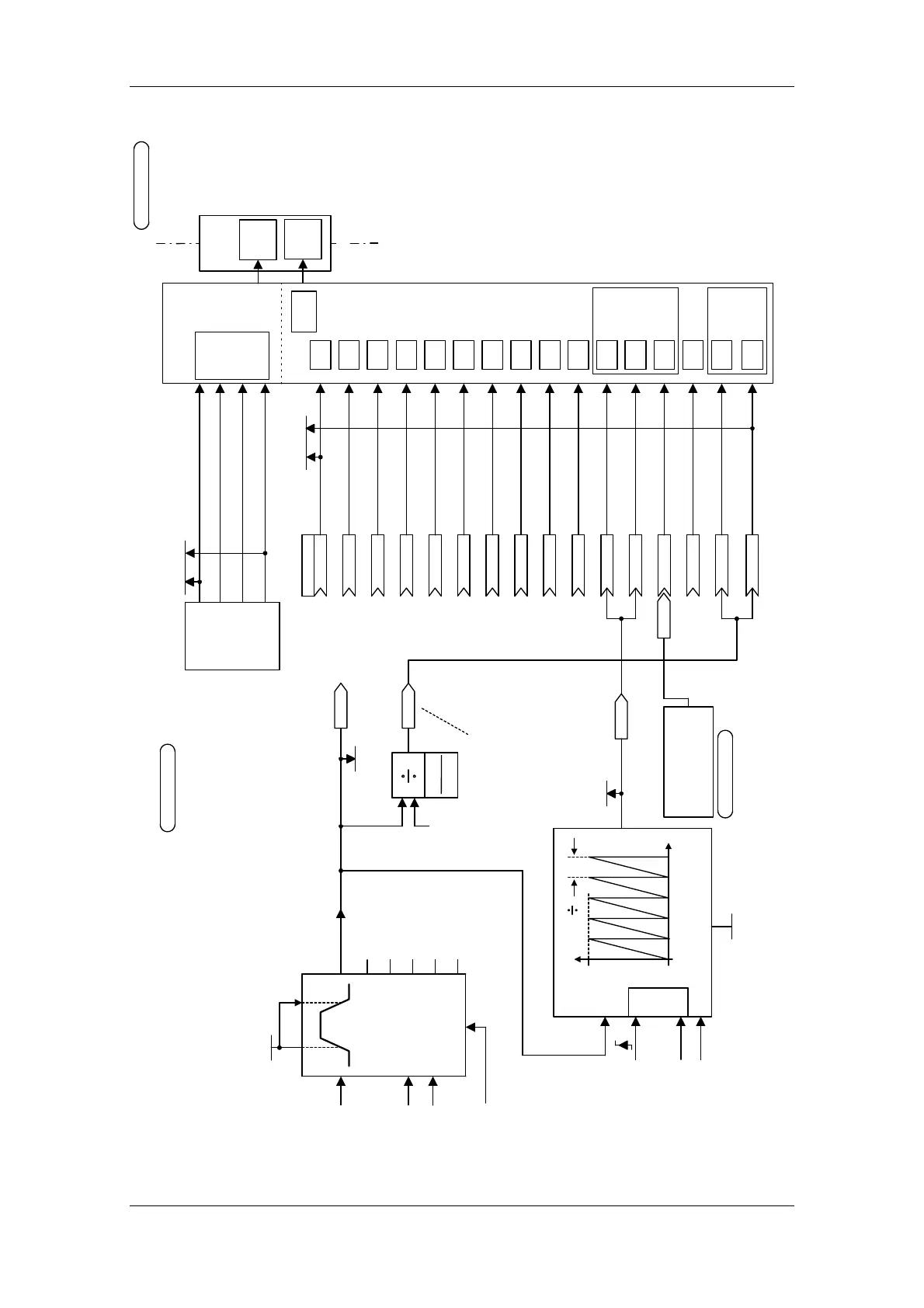
PKW
processing
PKW
words
PZD
words
1
2
3
4
6
5
7
8
9
10
11
12
13
14
15
16
PKW word 1 CB/TB
PKW word 2 CB/TB
PKW word 4 CB/TB
PKW word 3 CB/TB
.01 (32)
P0734 (0)
K
S.CB/TB transmit data
.02
K
.03
K
.04
K
.05
K
.06
K
.07
K
.08
K
.09
K
.10
K
.11 (817)
K
.12 (817)
K
.13 (255)
K
.14
K
.15 (820)
K
.16 (820)
K
Transmit
PKW
words
PZD
words
Dual-
port RAM
01
02
03
04
CB/TB transmit data
r735.01 to .16
PKW response
r739.05 to .08
• • •
• • •
CB/TB
(Communication/
technology module
Transmit telegram
V = 0
V = X
Virtual master axis
Acceleration
1 ... 2
31
- 1 [1000 LU/s
2
]
U685 (204)
V
U953.34 = 4
see [331.5]
The virtual master axis is a separate
free block and is not inserted in
positioning modes.
Velocity setpoint on virtual master axis
KK0816
V<>0
|X| > |V|
V = X
|X| < |V|
Freeze V
n691
± 2
31
- 1 [x 10 LU/min]
x1
*
x1 100%
x2
V_master_nom
[823.3]
x2
y
KK0820
U687 (4096)
0 ... 2
31
. 1 [LU]
Axis cycle length virtual master axis
(for rotary axis preferably set to number of LU
per revolution of the master axis)
Velocity setpoint on virtual
master axis in [% of U682]
[832.2]
<1> If U685 = 0 the ramp-function generator is deactivated and
output V follows input X without delay.
This could be useful if you want to use advanced ramp-
function generator with smooth transitions on sheet [790]
for the virtual master axis. In this case, you can also use the
integrator on sheet [791].
S
ACL_V
ACL_V
V
ACL_V
0
t
SET
SET-
VAL
EN
KK0817
Position setpoint of
virtual master axix
S
n690
[LU]
(e.g. to SIMOLINK,
transmit words 1 and 2: P751.01 = 817,
P752.02 = 817 [160.1])
Integrator
V
Velocity ramp-function generator
<3>
<1>
A
B
C
D
A
B
CD
VM pos.
Sign of life
U953.20 = 4
K0255
Sign of life
Generate sign-of-life
counter
U950.21 = 4
VM vel.
Provision of transmit data via PROFIBUS
 Loading...
Loading...









