Commissioning Manual
116 6FC5397-4EP10-0BA8, 07/2018
To implement Jog test for the SINAMICS V70 drive, proceed through the following steps:
1. Switch on the 24 VDC power supply to the drive.
2. Switch on the 3 phase 380 VAC line supply to the drive.
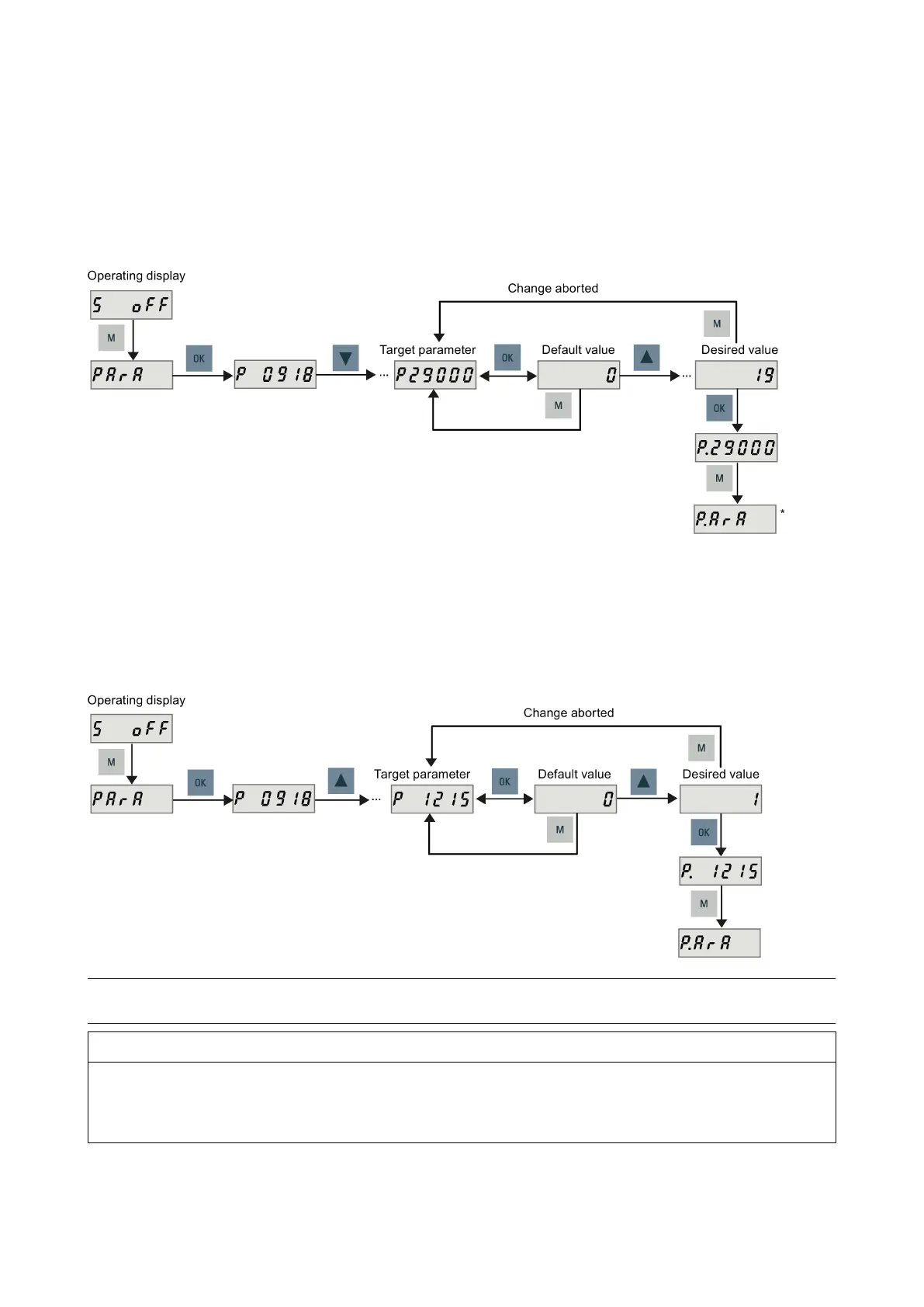
3. Proceed as follows to configure a motor with an incremental encoder; otherwise, skip Steps 3 and 4 and go to Step 5
directly.
Configure the motor ID p29000 (default = 0). You can find the motor ID of the connected motor on its rating plate.
* The dot means that at least one parameter is changed without saving. To save the parameter changes, see Step 6.
4. Configure the motor brake p1215 as follows. For a motor without a holding brake, skip this step and go to Step 5 directly.
– = 0 (default): No motor holding brake available
– = 1: Motor holding brake under sequence control
– = 2: Motor holding brake always open
– = 3: Motor holding brake under sequence control by the SINUMERIK 808D ADVANCED
Note
For a motor with an absolute
encoder, the operating principle of the holding brake is configured automatically.
Shortening the service life of motor brake
The motor brake is used for holding the load in position only. Frequent emergency stops with the motor brake can
shorten its service life.
Unless absolutely necessary, do not apply the motor brake as an emergency stop or deceleration mechanism.

 Loading...
Loading...









