4.8 Viewing Motor Measurement Values (With Hioki 9791 or 9793 installed)
86
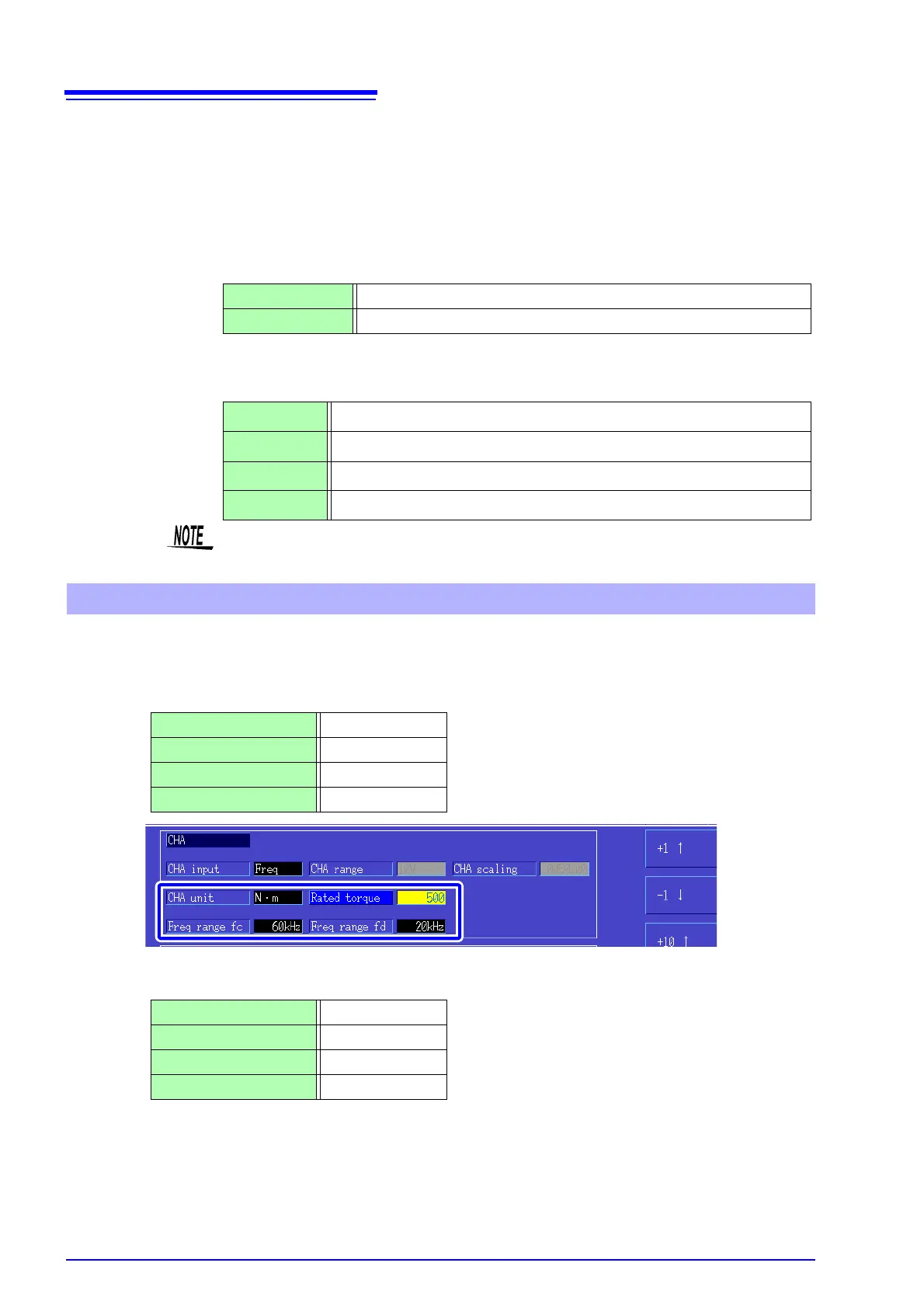
When [CHA input] is set to [Freq], make these four settings to suit the sensor: [CHA unit], [Rated torque],
[Freq range fc], and [Freq range fd].
Example 1. Using a torque sensor rated at 500
N• m for an output span of 60 kHz ±20 kHz
Example 2. Using a torque sensor rated at 2 k
N• m, with maximum positive rated torque providing 15 kHz
output, and maximum negative rated torque providing 5 kHz output
CHA scaling Settable from 0.01 to 9999.99.
The measurement value displayed for CH A = CH A input voltage × CH A scaling value.
Set [CHA unit] according to the torque value that corresponds to one volt of torque
sensor output.
(Scaling value = max. rated torque of sensor
÷ output scale voltage value)
In this example, the scaling value is 50.
(50 = 500 N
• m ÷ 10)
+1, -1 10 V
Digit←, Digit→ 50
CHA unit Set to suit the torque sensor.
V Select to display raw input voltage.
mN• m Select this for torque sensors rated at 1 mN• m to 999 mN• m per volt output.
N• m Select this for torque sensors rated at 1 N• m to 999 N• m per volt output.
kN• m Select this for torque sensors rated at 1 kN• m to 999 kN• m per volt output.
When CH A units are set to [V], motor power [Pm] is not displayed.
When [Freq] is selected
CHA unit N• m
Rated torque 500
Freq range fc 60 kHz
Freq range fd 20 kHz
CHA unit kN• m
Rated torque 2
Freq range fc 10 kHz
Freq range fd 5 kHz