148 / 183
Assembly and Commissioning Instructions Servo amplifier D1-N
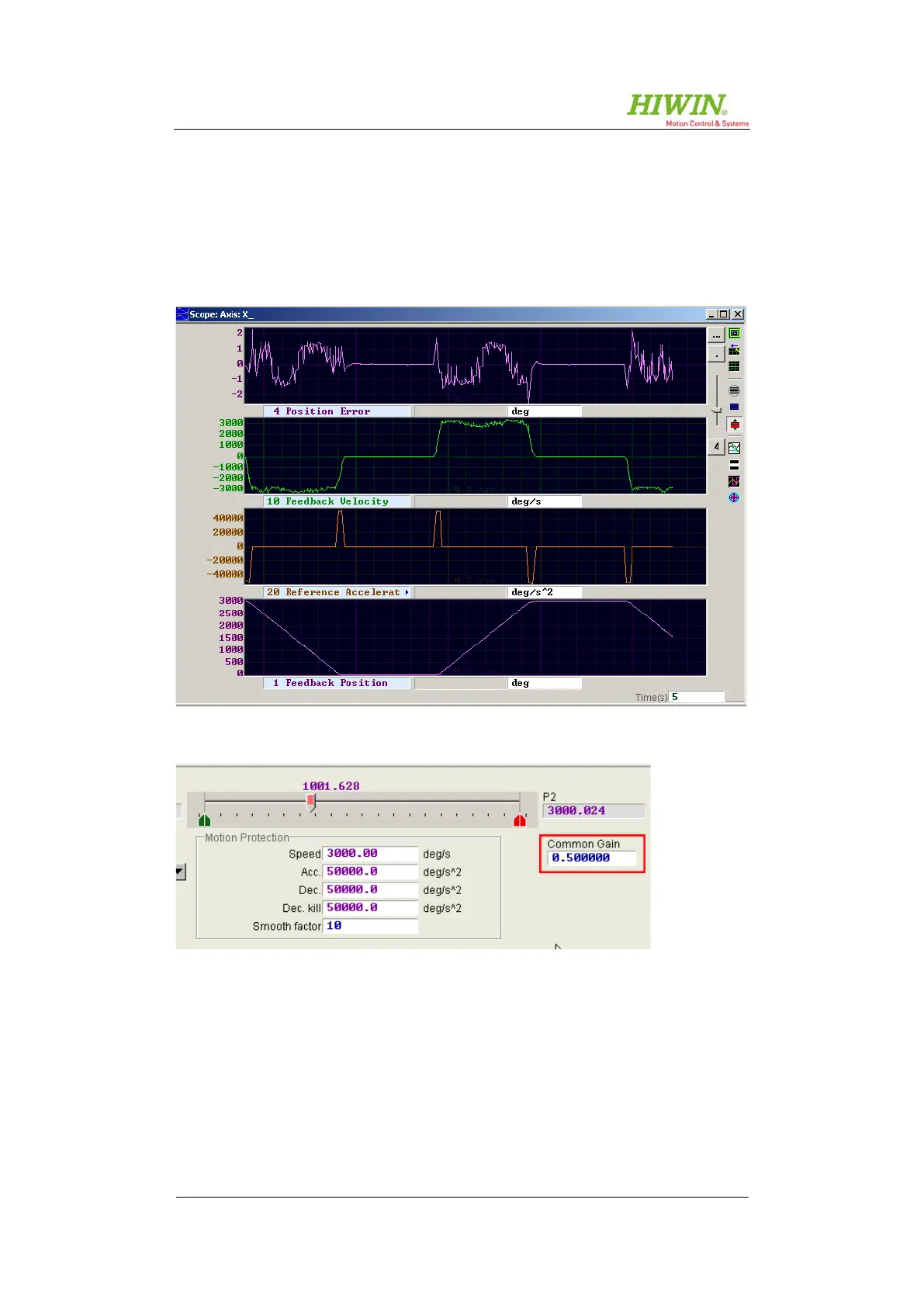
To optimise the control parameters, scope is used in conjunction with a continuous
point-to-point movement. Figure 9.43 shows the scope recording of a motor dis-
playing a position error of up to 2° during movement.
The motor was operated here with a “Common Gain” of 0.5.
Figure 9.43: “Scope” evaluation of point-to-point movement
Figure 9.44: “Common Gain”
Increasing the
makes control stricter. In this example, the posi-
tion error is reduced significantly to approx. 0.7° once the “Common Gain” is in-
creased to 0.8.

 Loading...
Loading...