154 / 183
Assembly and Commissioning Instructions Servo amplifier D1-N
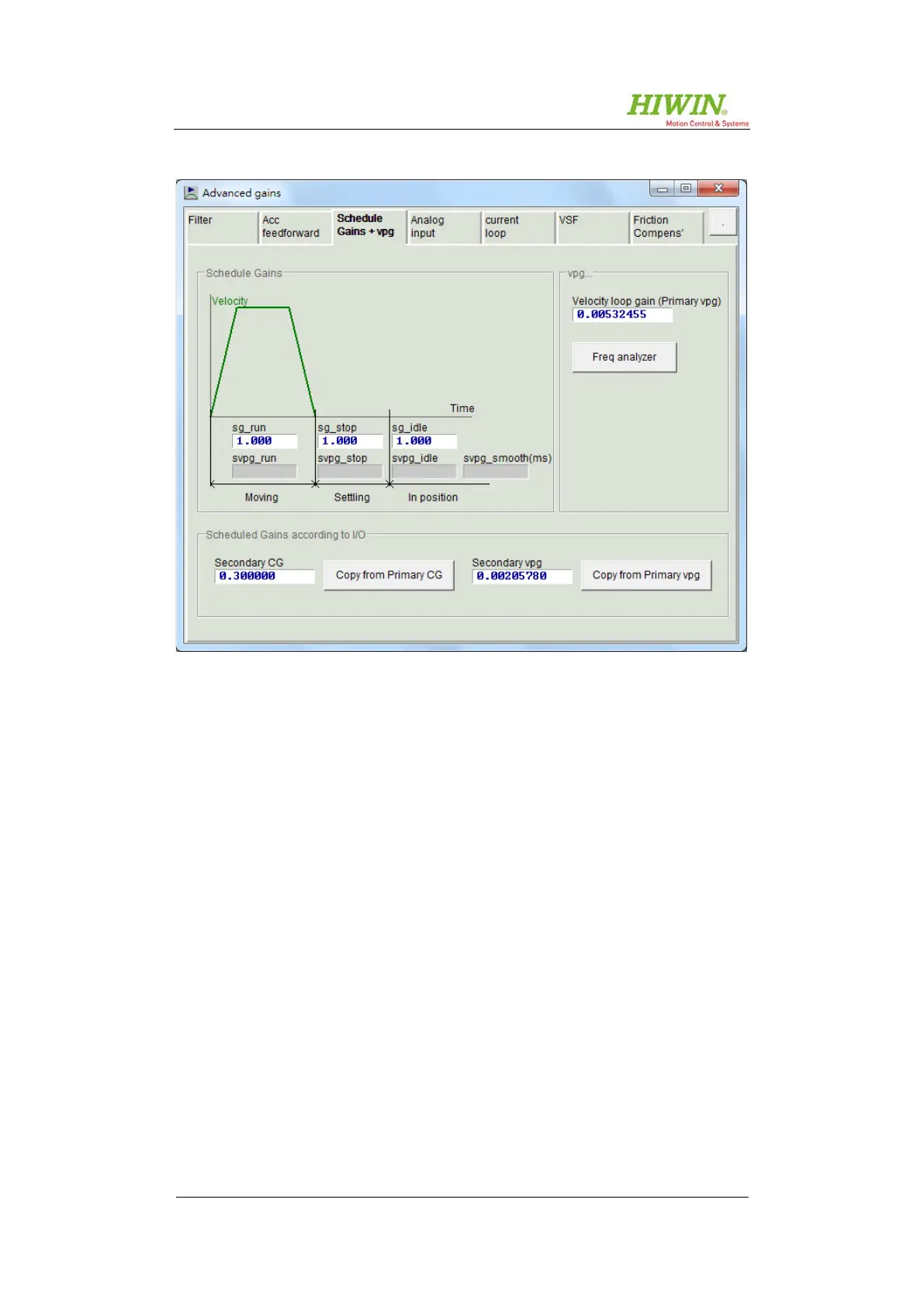
“Advanced gains” – “Schedule Gains + vpg”
Figure 9.51: “Advanced gains” – “Schedule Gains + vpg”
The D1-N has what is known as a “common gain (CG)” for speed and position con-
troller amplification.
The effect of this amplification can also be adapted in three sections of the motion
profile:
•
Mainly when the drive is in motion (moving)
•
Mainly when the drive is in its settling time (settling)
•
Mainly when the drive is stationary in a position (in position)
The value entered is multiplied internally by the “CG”.
The “vpg” (Velocity proportional gain) was set automatically after the mass inertia
measurement
This value is ideal when the load and friction don't change. Howev-
er, if these parameters change, a second gain (“secondary CG” and “secondary
vpg”) can be used to adjust the optimum controller amplification. A digital input
must be assigned accordingly for the changeover.
 Loading...
Loading...
