149
ifm Vision Assistant O3M
UK
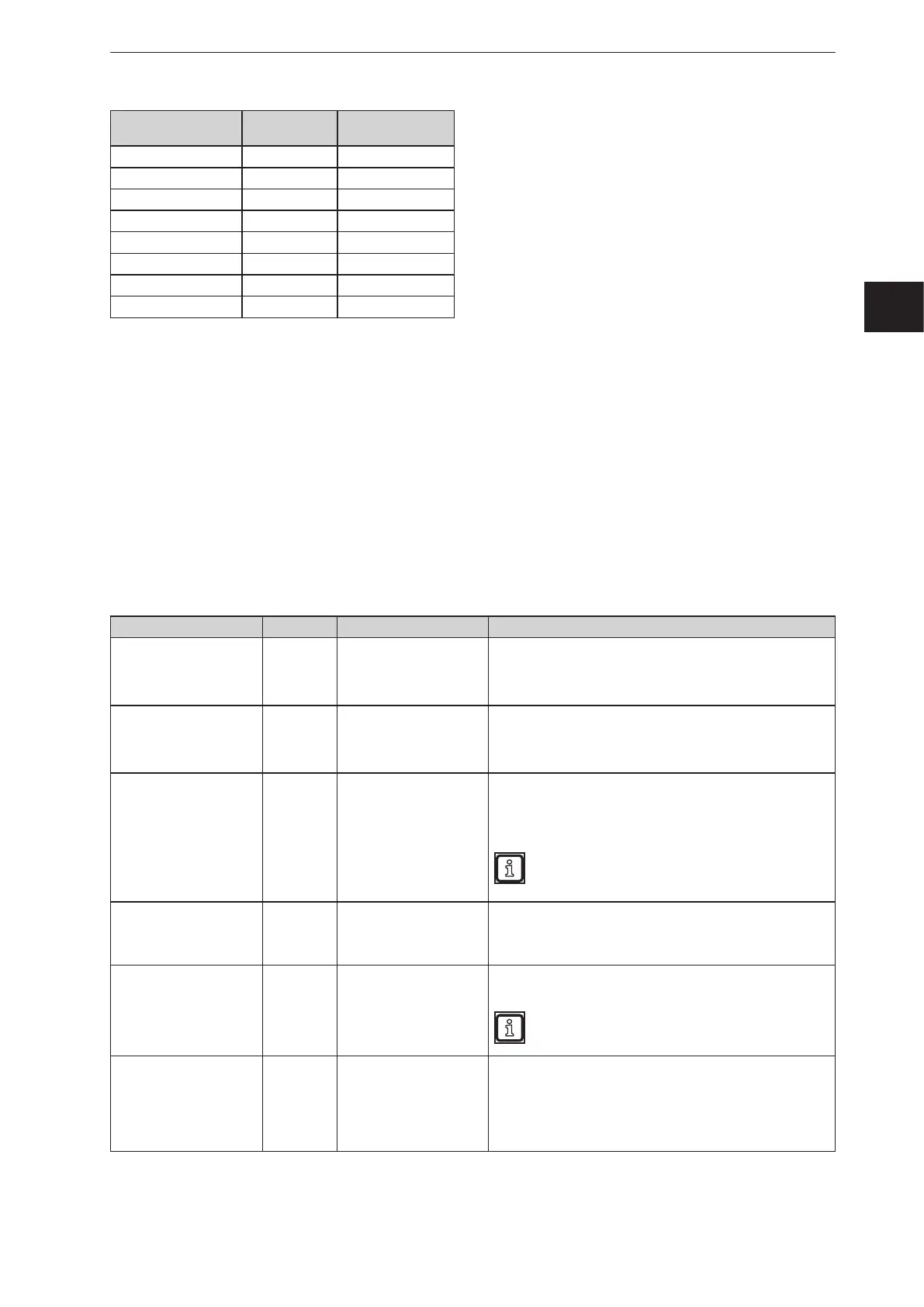
ROI group (index)
z-value
(height)
x-value (distance)
9 -0.01 m 3.56 m
10 0.95 m 1.11 m
11 0.18 m 8.14 m
12 0.03 m 3.97 m
13 1.86 m 6.79 m
14 1.97 m 5.38 m
15 0.06 m 2.87 m
16 0.00 m 3.91 m
15.5 Description of the "Input" modules – Firmware OD
The following input modules are only available in the OD firmware variant:
● Object detection
● Zone-based
● Time-based
● Input value of index
15.5.1 "Object detection" module
The "Object detection" module has the following settings:
Setting Data type Index Description
Object -> acceleration x
[1..20]
Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The acceleration of the object along the x-axis of the world
coordinate system is provided.
This value is the relative acceleration between device and
object [m/s²].
Object -> acceleration y
[1..20]
Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The acceleration of the object along the y-axis of the world
coordinate system is provided.
This value is the relative acceleration between device and
object [m/s²].
Object -> acceleration z
[1..20]
Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The acceleration of the object along the z-axis of the world
coordinate system is provided.
This value is the relative acceleration between device and
object [m/s²].
The value along the z-axis is only available when
reflector objects are used. For normal objects this value
is always "0" (zero).
Object -> age [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The age of the object is provided in measuring cycles. The
value indicates the number of measurement cycles for
which this object has already been recorded and tracked
[measurement cycle].
Object -> distance to
vehicle [1..20]
Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The minimum distance between the defined vehicle size and
the object is provided (radially proximate distance).
The value is only available if normal objects are used.
For reflector objects this value is always "0" (zero).
Object -> probability of
existence [1..20]
Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The probability of existence of the object is provided as a
measure of quality:
● "0": very low probability of existence of the object
● "0..1": the higher the value, the higher the probability of
the object's existence
● "1": very high probability of existence of the object