ifm Vision Assistant O3M
64
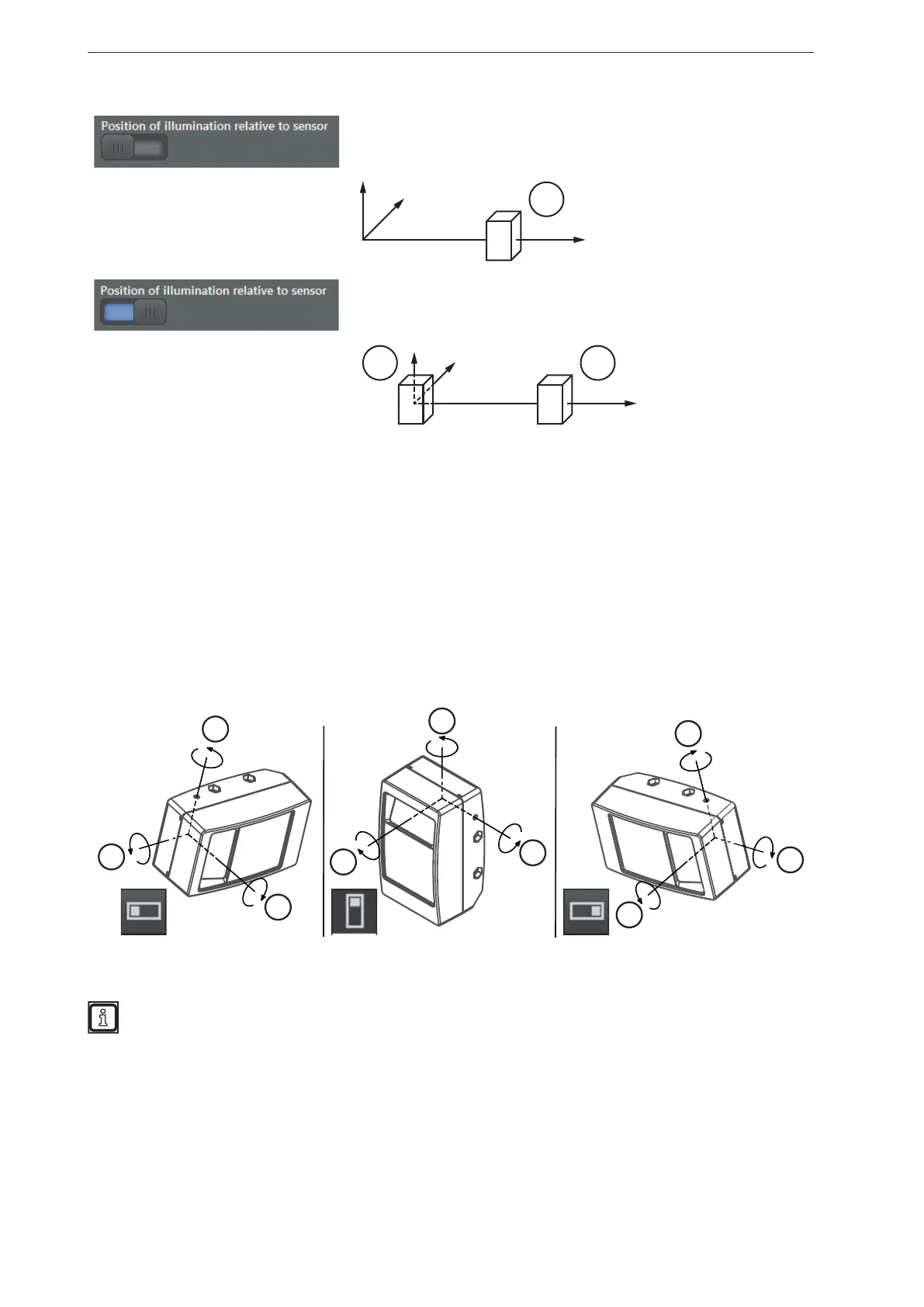
Absolute in the world coordinates: The position of the illumination
unit (1) is specified with the absolute coordinates of the world
coordinate system.
Z
X
1
Relative to the sensor: the position of the illumination unit (1)
is specified in relation to the device (2) in the world coordinate
system.
Y
Z
X
12
9.7 Mounting angle of the device
The device is capable of compensating mounting angles and to convert the 3D data into the desired
orientation.
For example, it is possible to transform the pixels of the road level irrespectively of the pitch angle of the
device, so that the pixels are parallel to the X axis. For the transformation, the device needs information
about its orientation in relation to the world coordinate system.
Al in all, three angles can be set. The angles are indicated as follows:
● (1): angle of pitch
● (2): angle of rotation
● (3): angle of roll
1
1
1
2
2
2
3
3
3
The figure shows the angles in relation to the orientation of the sensor.
Please note which sensor orientation is set when entering the angles
(→ „9.4 Position of the device“).
The angles can be set in two ways:
● normal mode
● expert mode