ifm Vision Assistant O3M
152
15.5.4 "Input value of index" module
The "Input value of index" module addresses measured values using the index. An index is assigned
to each signal at input "in1" of the module. The number of values at the input is always identical to the
number of values at the output. The module addresses the values using indices determined within the
logic (dynamic addressing). This is possible because internally, an index is added to each value.
The following values have no index:
● fixed values (e.g. defined with the "Fixed value" module)
● the sum of values with different indices
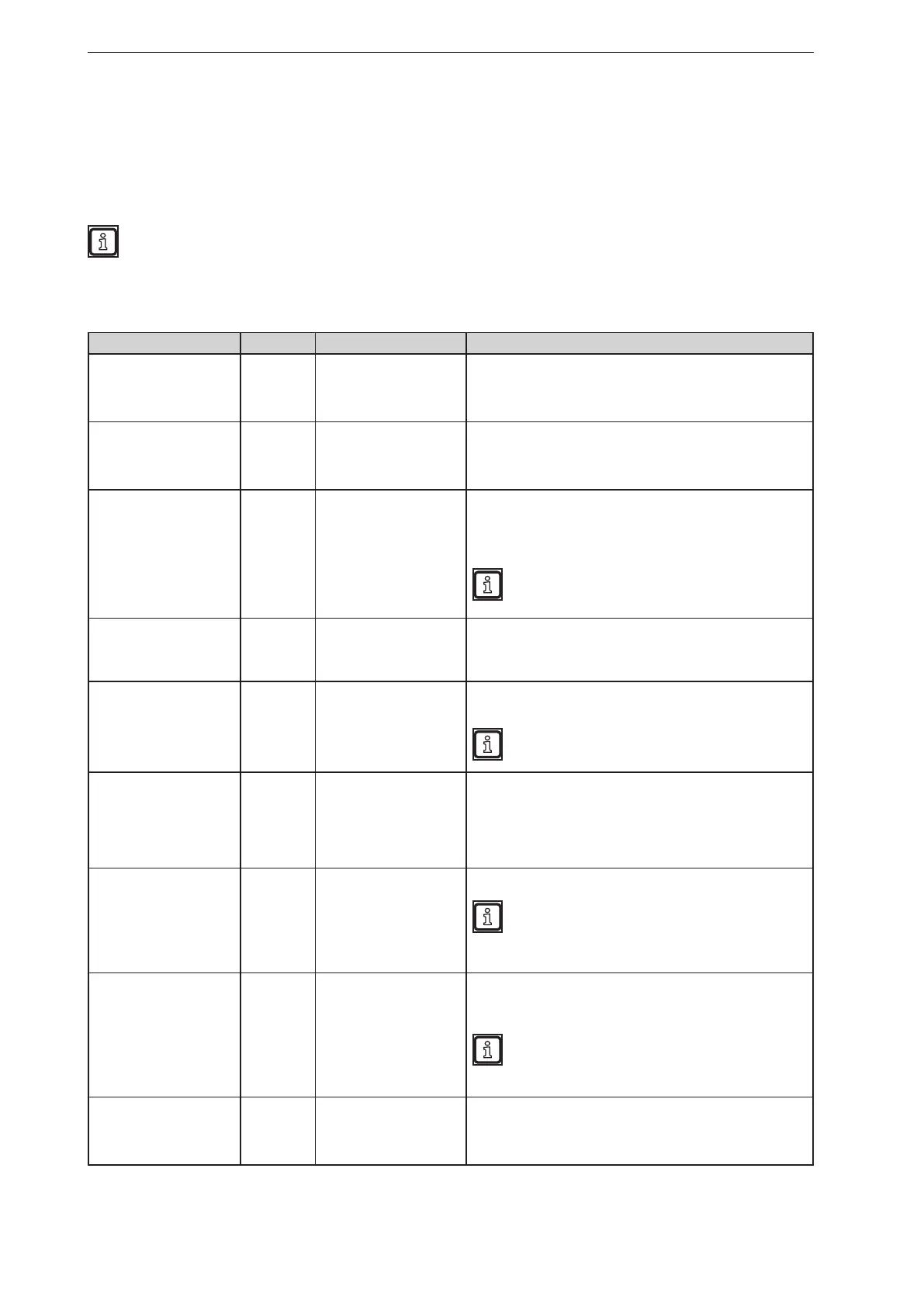
The "Input value of index" module has the following settings:
Setting Data type Index Description
Object -> acceleration x
[1..20]
Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The acceleration of the object along the x-axis of the world
coordinate system is provided.
This value is the relative acceleration between device and
object [m/s²].
Object -> acceleration y
[1..20]
Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The acceleration of the object along the y-axis of the world
coordinate system is provided.
This value is the relative acceleration between device and
object [m/s²].
Object -> acceleration z
[1..20]
Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The acceleration of the object along the z-axis of the world
coordinate system is provided.
This value is the relative acceleration between device and
object [m/s²].
The value along the z-axis is only available when
reflector objects are used. For normal objects this value
is always "0" (zero).
Object -> age [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The age of the object is provided in measuring cycles. The
value indicates the number of measurement cycles for
which this object has already been recorded and tracked
[measurement cycle].
Object -> distance to
vehicle [1..20]
Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The minimum distance between the defined vehicle size and
the object is provided (radially proximate distance).
The value is only available if normal objects are used.
For reflector objects this value is always "0" (zero).
Object -> probability of
existence [1..20]
Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The probability of existence of the object is provided as a
measure of quality:
● "0": very low probability of existence of the object
● "0..1": the higher the value, the higher the probability of
the object's existence
● "1": very high probability of existence of the object
Object -> ID [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The internal ID of the object is provided.
The ID is not the index. The ID is a unique value.
The ID of an object always remains the same as long
as an object remains detected.
The ID "0" is output if no valid object was detected.
Object -> type [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The type of the object is provided:
● "0": normal object
● "1": reflector object
Reflector detection must be active for an object to
be recognised as a retroreflector. An object whose
reflectivity exceeds the set threshold is recognised as
a retroreflector.
Object ->speed x [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The speed of the object along the x-axis of the world
coordinate system is provided.
This value is the relative speed between device and object
[m/s²].