153
ifm Vision Assistant O3M
UK
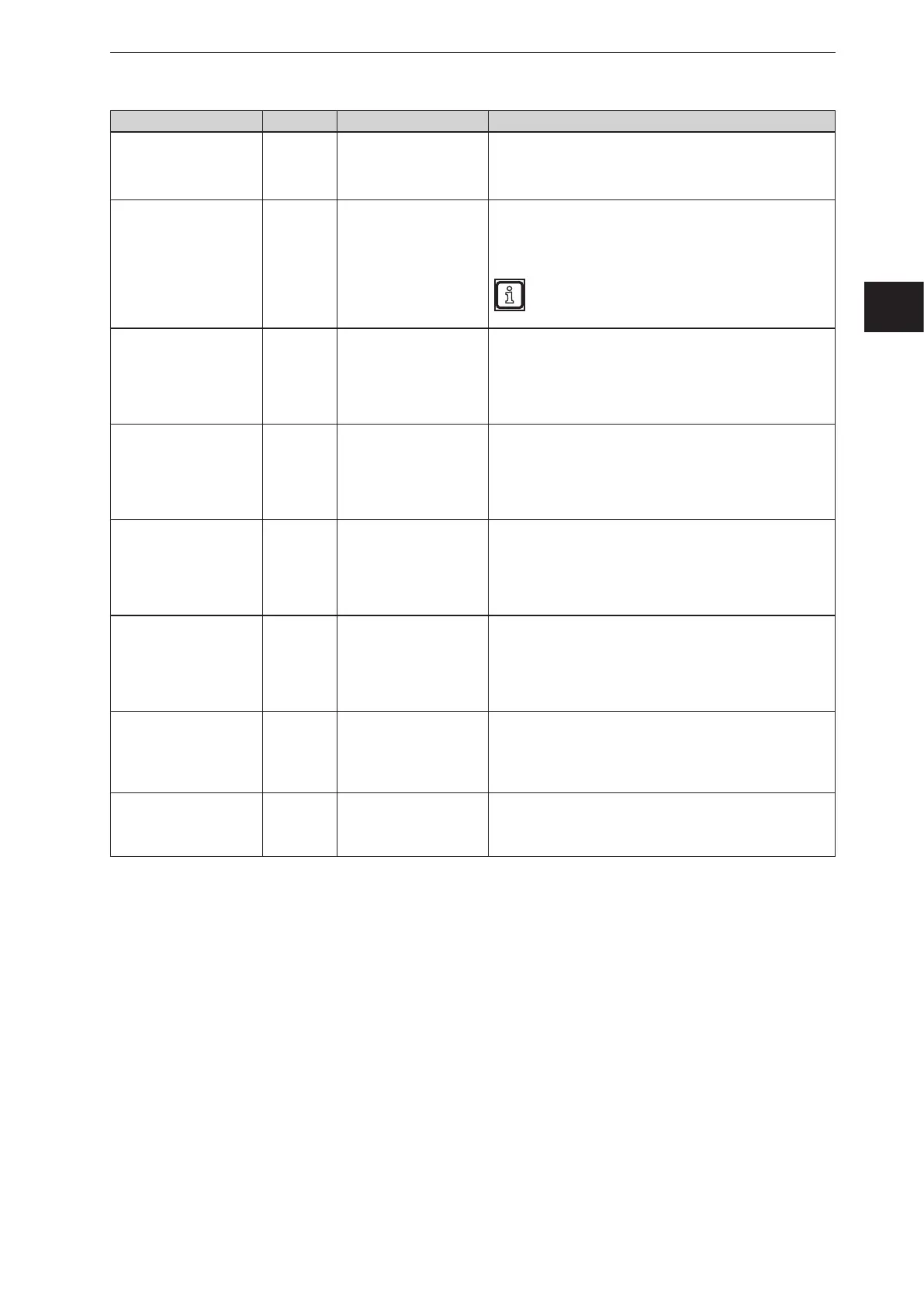
Setting Data type Index Description
Object ->speed y [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The speed of the object along the y-axis of the world
coordinate system is provided.
This value is the relative speed between device and object
[m/s²].
Object ->speed z [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The speed of the object along the z-axis of the world
coordinate system is provided.
This value is the relative speed between device and object
[m/s²].
The value along the z-axis is only available when
reflector objects are used. For normal objects this value
is always "0" (zero).
Object -> x1 [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The x-coordinate of the first point of the object in the world
coordinate system is provided.
With reflector objects, this value corresponds to the minimum
x-value. In the case of normal objects, this is the first corner
point with reference to the background model (also allows
"oblique" objects).
Object -> x2 [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The x-coordinate of the second point of the object in the
world coordinate system is provided.
With reflector objects, this value corresponds to the
minimum x-value. In the case of normal objects, this is the
second corner point with reference to the background model
(also allows "oblique" objects).
Object -> y1 [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The y-coordinate of the first point of the object in the world
coordinate system is provided.
With reflector objects, this value corresponds to the
minimum y-value. In the case of normal objects, this is the
first corner point with reference to the background model (also
allows "oblique" objects).
Object -> y2 [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The y-coordinate of the second point of the object in the
world coordinate system is provided.
With reflector objects, this value corresponds to the
maximum y-value. In the case of normal objects, this is the
second corner point with reference to the background model
(also allows "oblique" objects).
Object -> z(min) [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The minimum z-coordinate of the object in the world
coordinate system is provided.
For normal objects, the value can be minimised to the values
of the height of the object detection (ground separation,
default value = "0.5 m").
Object -> z(max) [1..20] Numerical
Index from object list
(vector with 20 values,
address range from
1-20)
The maximum z-coordinate of the object in the world
coordinate system is provided.