Suggestedprogrammingprocedure
wheelchairreachesasteadyturningspeed.AdjustMax
TurnSpeedparameteruntilturnspeedseemslikea
comfortablemaximum.
SetspeeddialorslidertominimumpositiontoadjustMin
TurnSpeed.
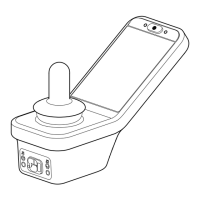
Adjustveercompensation
Ifwheelchair’smotorsdonotperformexactlythesame
aseachother,wheelchairdoesnotdriveinastraightline.
Tocompensatedifferencesbetweenmotors,adjustVeer
Compensationparameter .
1.
Fig.6-9
Fig.6-10
OpenModules→PowerModule.
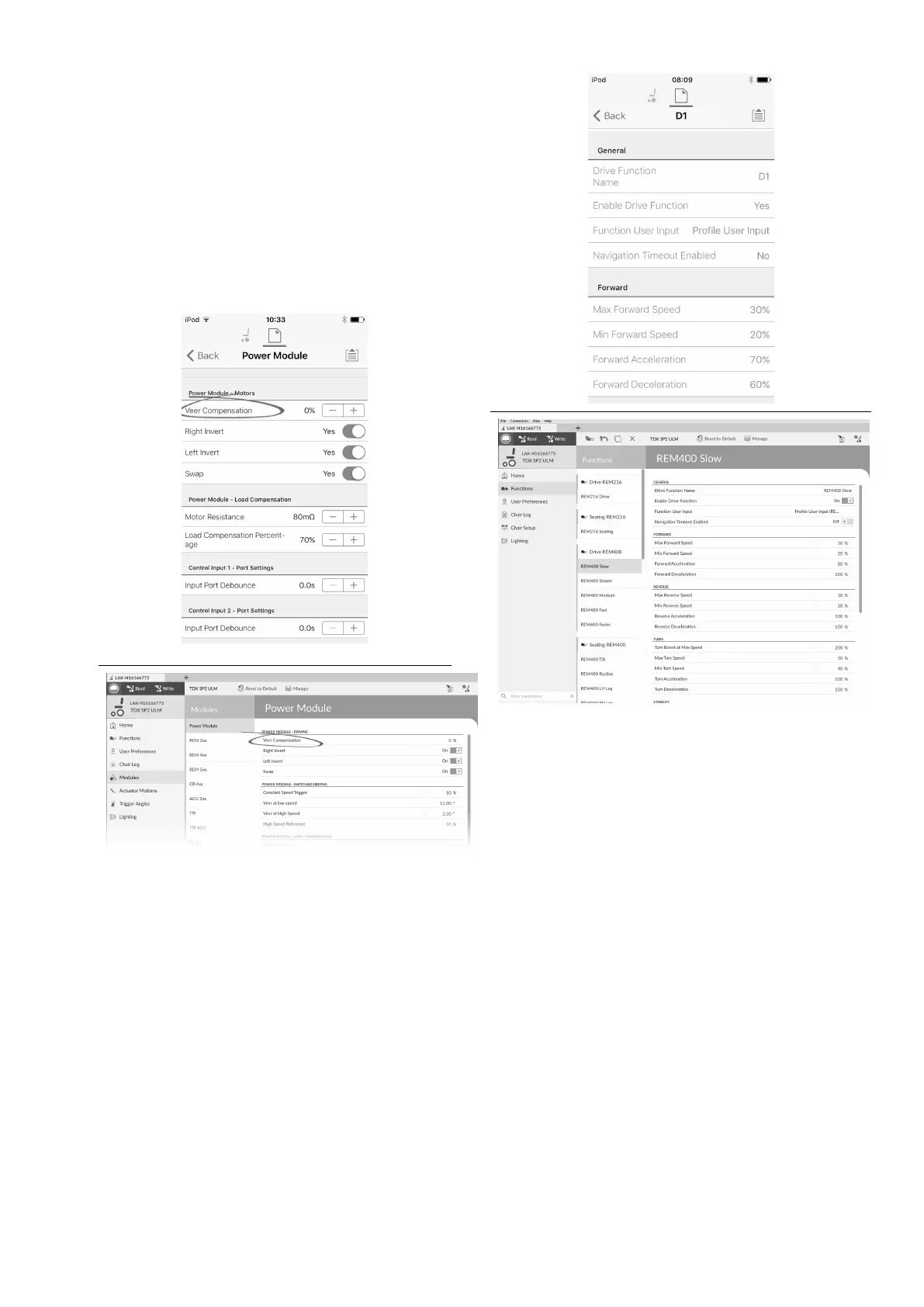
6.5Step5–Adjustaccelerationsettings
Thefollowingparametersmustbesetforeachdrive
function.
1.OpenFunctions–>opendesireddrivefunction.
Adjustforwardacceleration
Setspeeddialorslidertomaximumanddeectjoystick
fullyforward.Waituntilwheelchairreachessteady
forwardsspeed.AdjustForwardAccelerationparameterif
wheelchairgetsuptosteadyspeedtooquicklyorslowly.
Repeatuntilaccelerationfeelscomfortableandsafe.
Adjustforwarddeceleration
Tosetdecelerationrateinforwarddirection,release
joystickoncewheelchairhasreachedsteadyforward
speed.AdjustForwardDecelerationparameterif
wheelchairslowsdowntooquicklyorslowly.Repeatuntil
decelerationfeelscomfortableandsafe.
Adjustreverseacceleration
Setspeeddialorslidertomaximumanddeectjoystick
fullyinreverse.Waituntilwheelchairreachessteady
reversespeed.AdjustReverseAccelerationparameterif
wheelchairgetsuptosteadyspeedtooquicklyorslowly.
Repeatuntilaccelerationfeelscomfortableandsafe.
Adjustreversedeceleration
Tosetdecelerationrateinreversedirection,release
joystickoncewheelchairhasreachedsteadyreversespeed.
AdjustReverseDecelerationparameterifwheelchairslows
downtooquicklyorslowly.Repeatuntildecelerationfeels
comfortableandsafe.
1605129-G75