VSD Series Drives User Manual Powered by Eaton Technology
15-24 For more information visit: www.johnsoncontrols.com LIT-1201828
November 2009
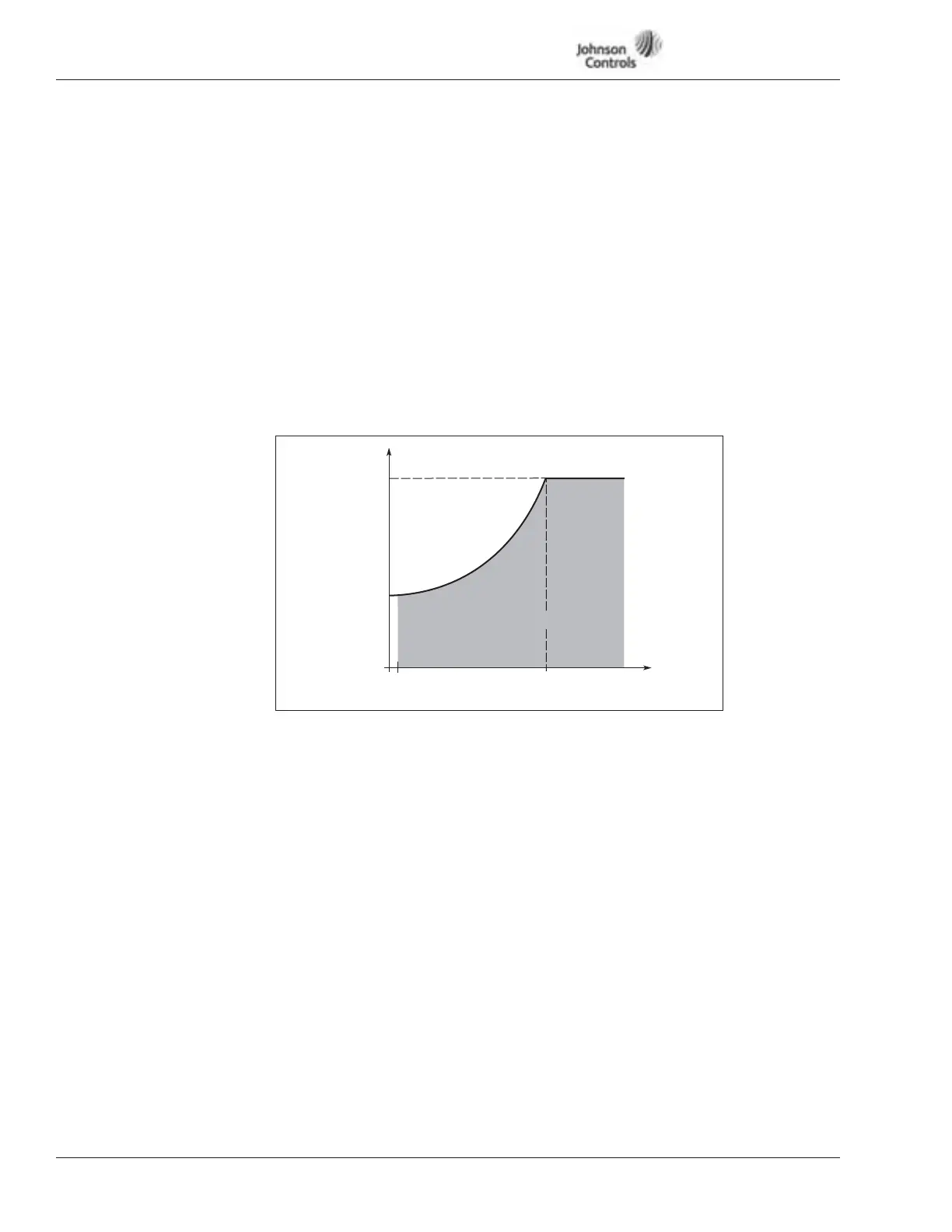
Figure 15-20: Setting of Minimum Load
716 Underload Protection
0 No response
1 Warning
2 Fault, stop mode after fault according to ID402
3 Fault, stop mode after fault always by coasting
If tripping is set active the drive will stop and activate the fault stage. Deactivating the
protection by setting the parameter to 0 will reset the underload time counter to zero.
717 Underload Protection, Field Weakening Area Load
The torque limit can be set between 10.0 – 150.0% x T
nMotor
.
This parameter gives the value for the minimum torque allowed when the output
frequency is above the field weakening point. See Figure 15-20.
If you change ID108 (motor nominal current), this parameter is automatically restored
to the default value.
718 Underload Protection, Zero Frequency Load
The torque limit can be set between 5.0 – 150.0% x T
nMotor
.
This parameter gives the value for the minimum torque allowed with zero frequency.
See Figure 15-20.
If you change ID108 (motor nominal current), this parameter is automatically restored
to the default value.
Torque
ID717
ID718
Underload Area
Field Weakening
Point ID604
5 Hz
f