5-35
5-16 Gain Switching
Operating Functions
5
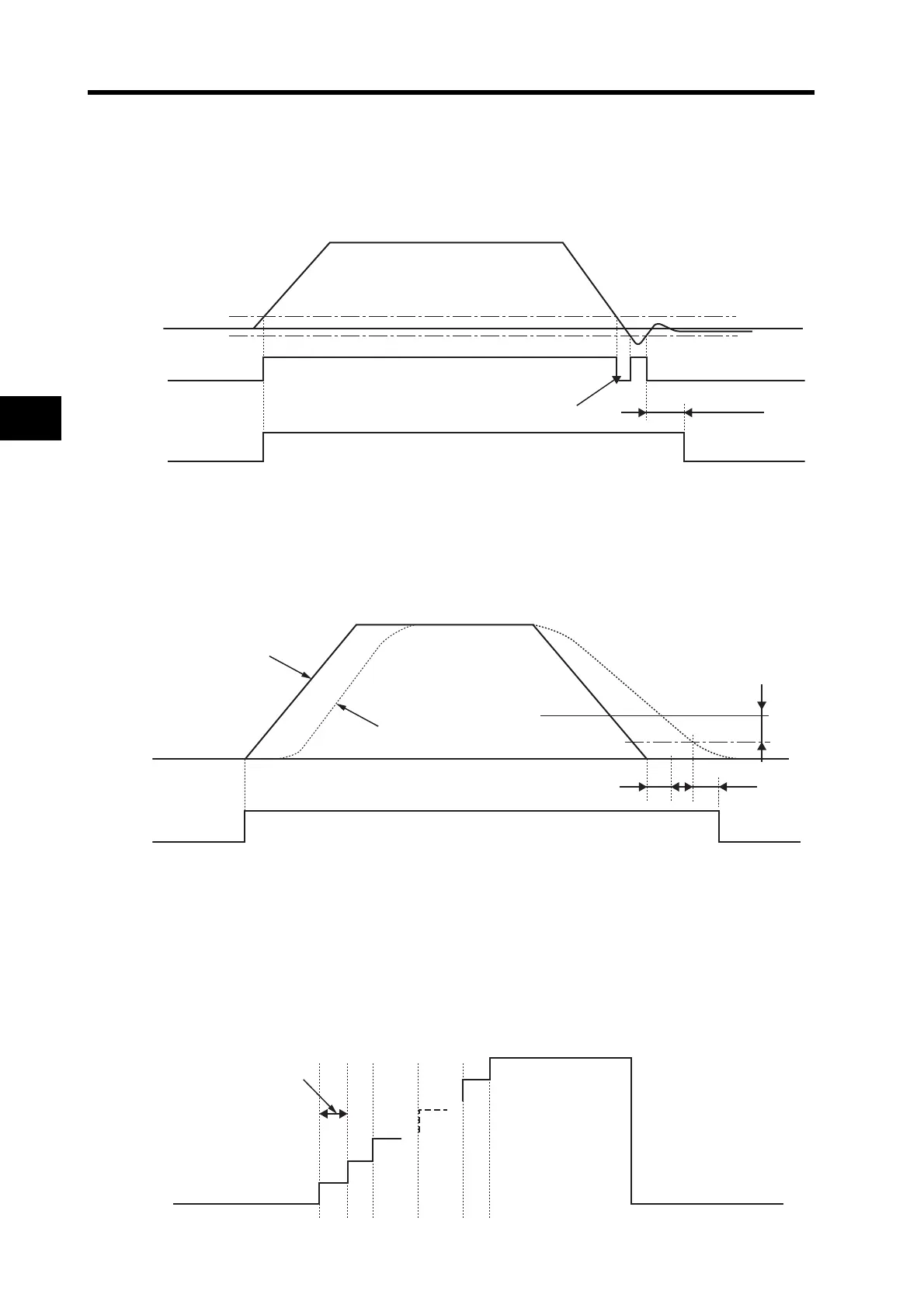
Gain Switch Setting (Pn031) = 8: Switching when the positioning completed signal
turns OFF
Switches to gain 2 when the accumulated pulses in the deviation counter exceed Positioning
Completion Range 1 (Pn060).
Gain Switch Setting (Pn031) = 10: Switching by the combination of position command
pulses received and speed
Switches to gain 2 when there are position command pulses received.
Switches to gain 1 when there are no position commands for the time specified in the Gain Switch
Time (Pn032), and when the speed is equal to or less than
the Gain Switch Level Setting (Pn033) the Gain Switch Hysteresis Setting (Pn034) [r/min].
Timing for Position Loop Gain Switching Time (Pn035)
When switching the gain, the speed loop gain, speed loop integration time constant, torque
command filter time constant, and speed detection filter will change at the same time, but switching
is made by the time set to reduce vibration or resonance in the machine caused by changing gain
from low to high.
The switching time is in units of 166 s of the internal cycle. If the position loop gain is increased
from 30 [1/s] to 50 [1/s] and Pn035 is set to 20, the gain moves up a step every 166 s. (3.32 ms)
Conversely, the gain goes down immediately when reducing the position loop gain from 50 [1/s] to
30 [1/s].
Pn032
INP1 ON INP1 ON
INP1 OFF
Amount of accumulated pulses in the deviation counter
Canceled because time condition is not satisfied
Gain 1 Gain 1Gain 2
Pn032Pn032
Pn033
Pn034
Actual Servomotor speed
Position command
Gain 1 Gain 1Gain 2
Low gain Low gain
every 166 μs
1
2
3
N
High gain

 Loading...
Loading...







