Such micro operations as position adjustment can be applied with external control signals.
Used to set signal input terminal for controlling micro operation from external devices with
parameters P036~P040.
But run command select (parameter P003) should be set through external control.
・Turn the signal input ON, and then enter the JOG operation mode.
・JOG operation is carried out according to "P042: JOG frequency", "P043: JOG acceleration
time" and " P044: JOG deceleration time" settings, after run/stop and forward run/reverse run
signals are input with terminals No.2 and No.3.
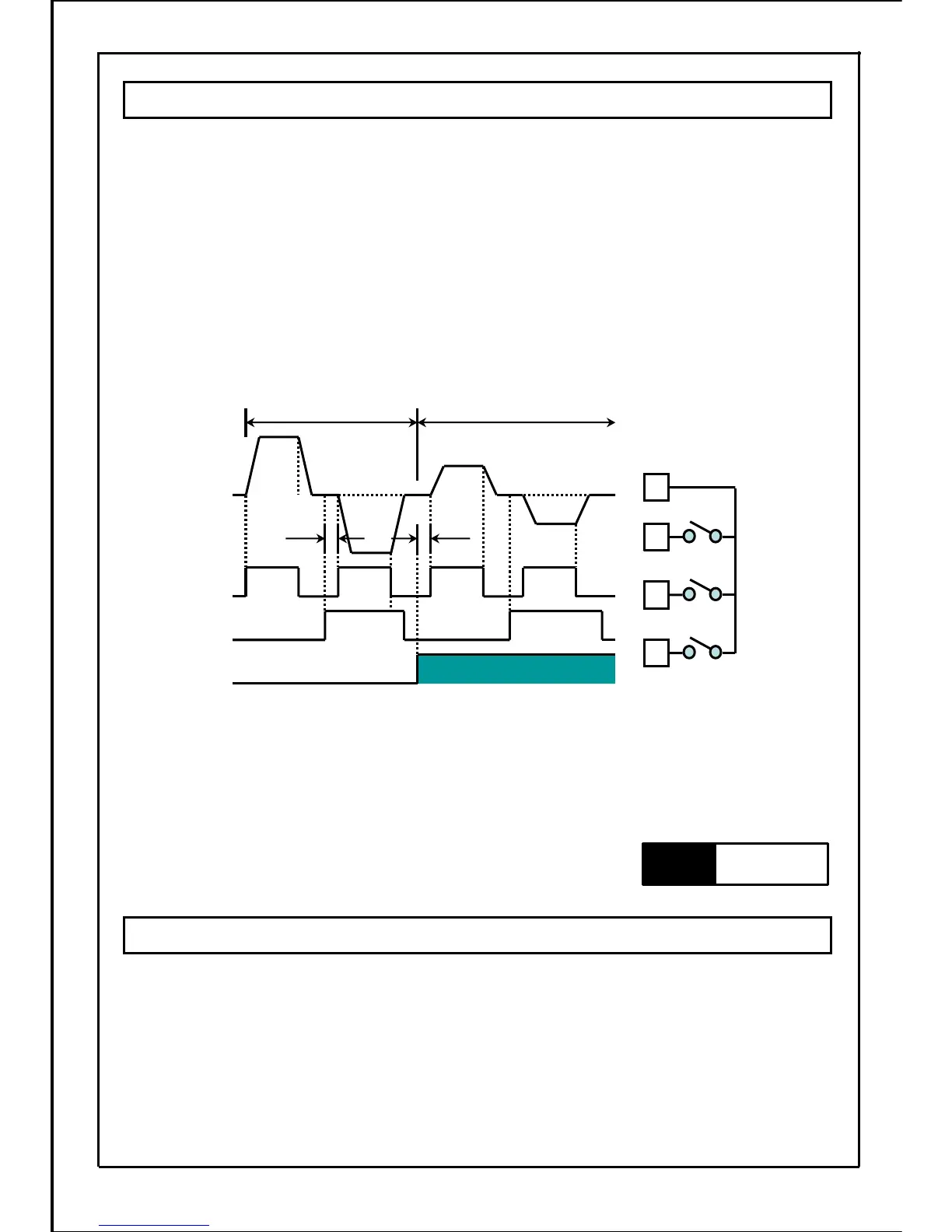
JOG function
Note 1) During JOG operation, turn the JOG select signal ON (B time) and then turn the run
signal ON.
Note 2) During reverse run operation, turn the reverse run signal ON(A time) and then turn the
run signal ON.
《Example:》 When SW1 (parameter P036=3) is set to JOG function and run command
select (parameter P003 = 2),
1
2
3
Run/stop
Forward run
/reverse run
Common
【Terminal connection】
4
JOG select
(SW1)
Inverter oper-
ation status
JOG select
signal
ON
Run signal
Forward run/
reverse run signal
ON
ON ON
ON
ON
ON
Forward run
Reverse run
Inverter
operation status
JOG operation
BA
* A and B time is 50ms or more.
Used to set the signal input terminal for applying fault stop (emergency stop) to the inverter from
external devices.
・External fault stop input (setting data = 4) turns SW signal ON and then "AU" is displayed. The
inverter will stop input immediately.
・Input signal logic setting (A and B contact input select) can be set with "P041: input logic
setting".
External fault stop function
84
P042~P044
Related
parameters