(POSCONTROLMODE5)
4. Open ServoStudio2 Control > Range screen. Make sure the selected drive is the gantry host.
◼ Define the parameters to be recorded.
PTPVCMD
PE
V
ICMD
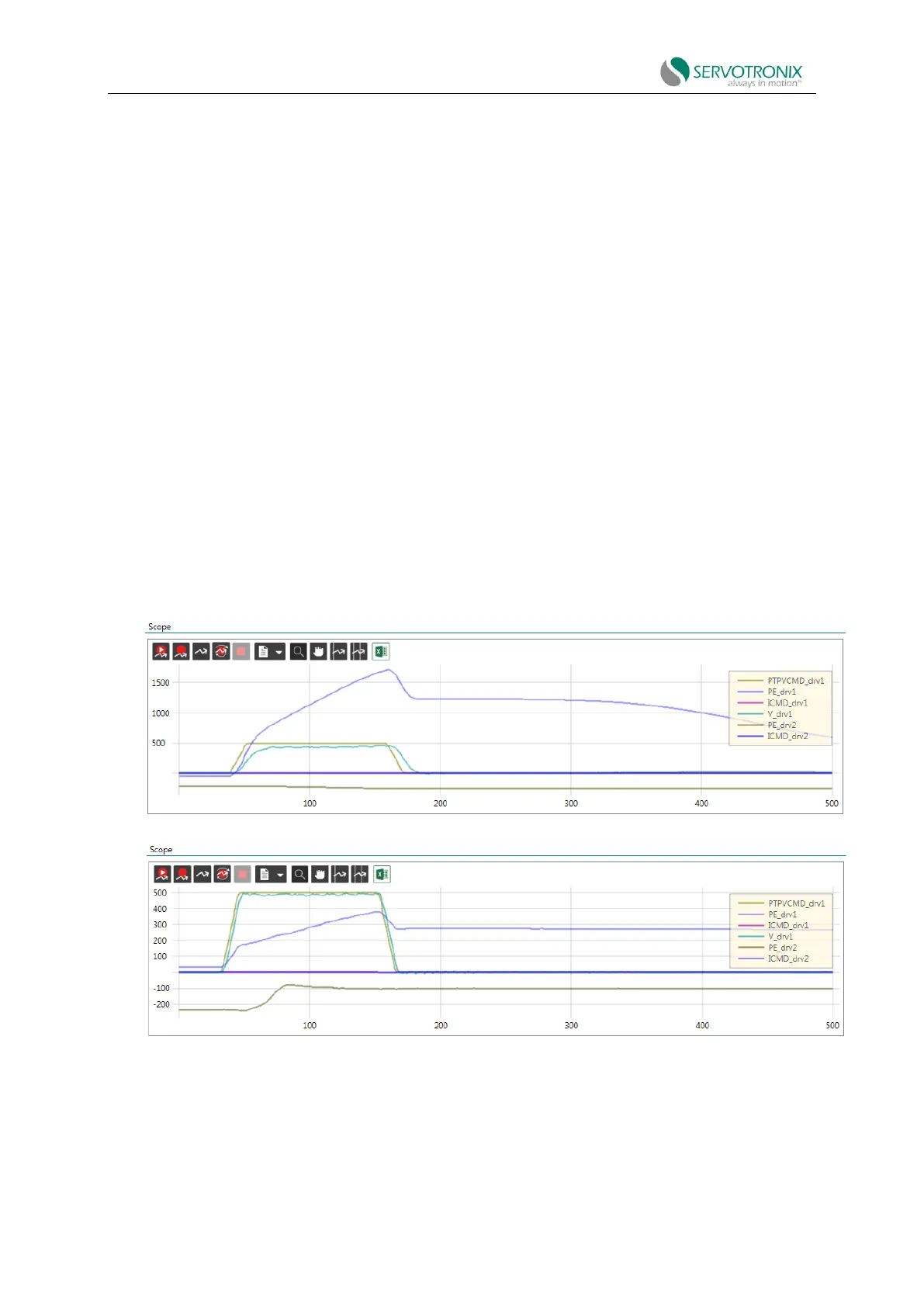
◼ Define a serial position motion command, execute and record. View the result chart.
Note: ServoStudio2 will record the PE and ICMD of both drives.
5. Gradually increase KNLD (HD differential gain) until the system produces audible noise. The
goal is to maintain the highest KNLD with the least amount of filtering.
While continuously testing the system, adjust the gain of the gantry main drive, as described
in the following steps.
Figure 8-44 KNLD=1
Figure 8-45 KNLD=20