Figure 8-49 KNLD=20
8. If necessary, reduce the setup time by increasing the KNLIV (HD differential-integral gain)
value. If there is oscillation at the end of the movement, decrease KNLIV.
9. Switch the drive axis to the gantry differential drive.
10. For a rigid gantry system, set the gain parameter of differential drive HD control loop to 0.
For a flexible gantry system, adjust the differential drive gain parameter as described in the
previous steps. It is likely that KNLI and KNIV will need to be set to 0 to prevent the current from
rising during quiescence.
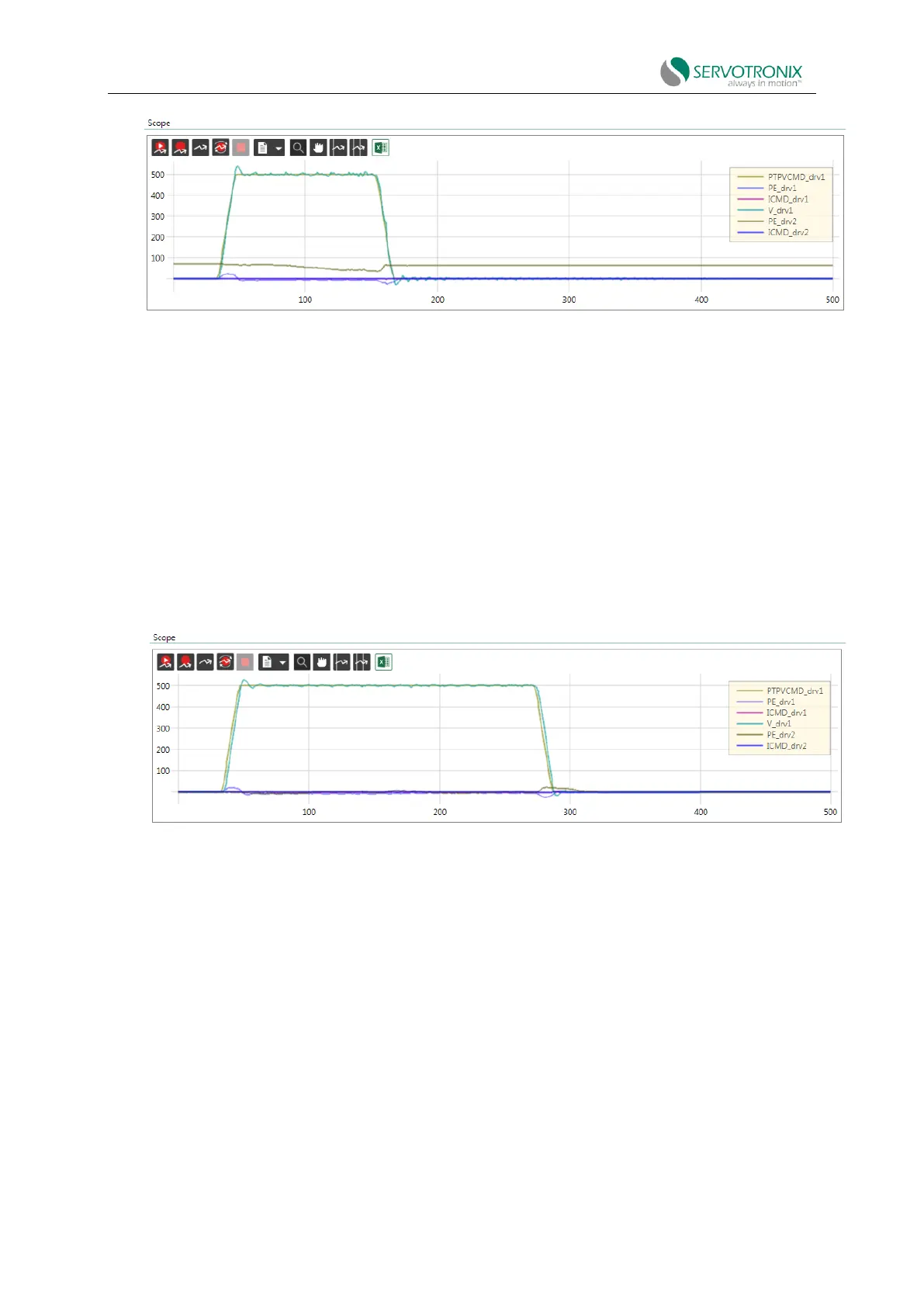
To test performance, switch the drive axis to the gantry main drive and perform a move/record.
Figure 8-50 Tuning both axes
Tuning using the Terminal - example
\1
K
#Delay100
CLEARFAULTS
KNLUSERGAIN1
NLTFDESIGNMODE1
NLTFBW400