The motor brake requires a separate power supply. If the load is inductive (such as a relay), an
external flywheel diode must be added.
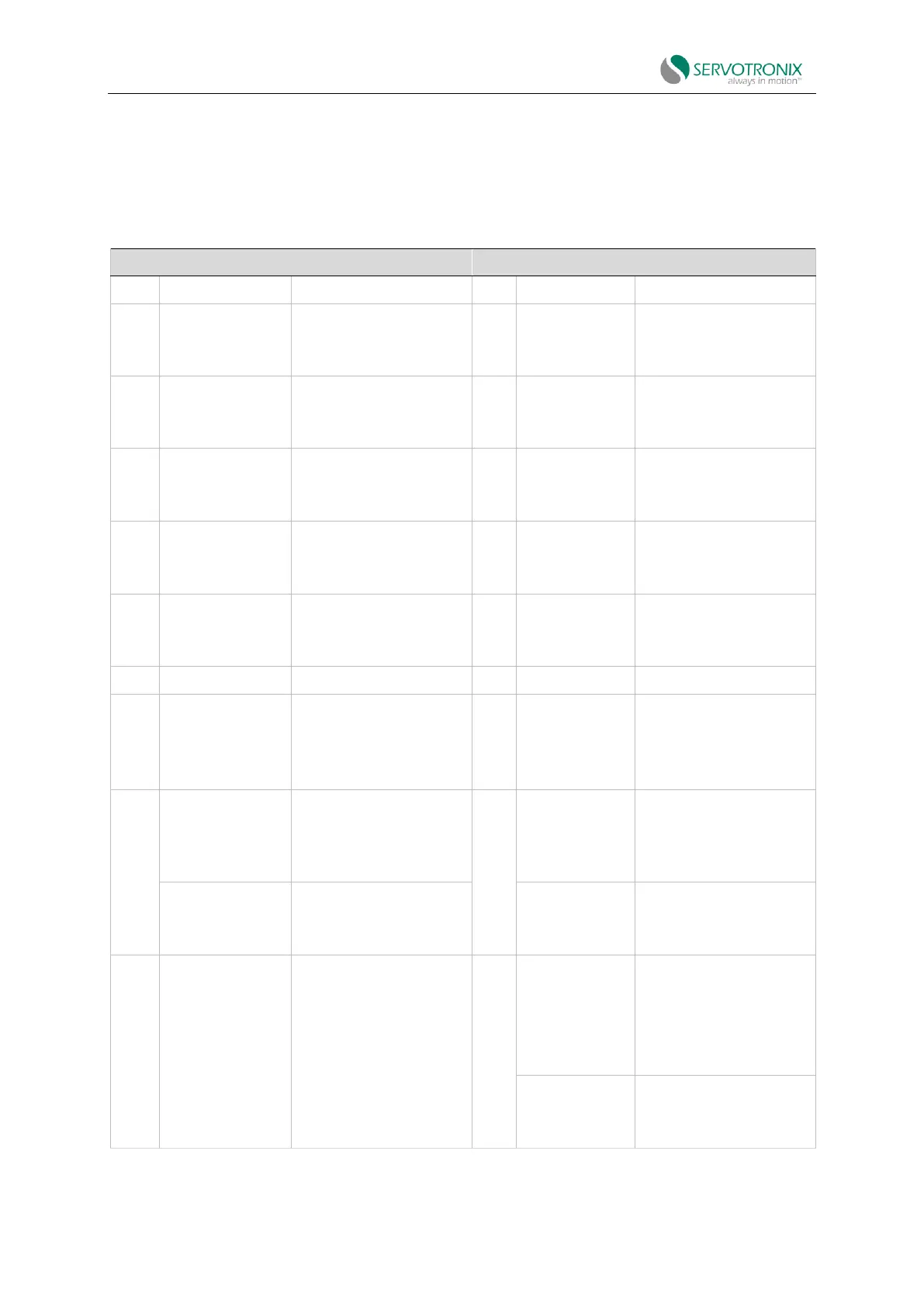
Table 4-11 Controller interface - AP/AF/EC mode
Optoisolated programmable
digital output. Read using
OUT1
Optoisolated programmable
digital input. Read using IN2
Optoisolated programmable
digital input. Read using IN1
Equivalent encoder
output A-
Equivalent encoder output
signal A low (RS422)
Equivalent encoder
output A+
Equivalent encoder output
signal A high (RS422)
Equivalent encoder
output B-
Equivalent encoder output
signal B low (RS422)
Equivalent encoder
output B+
Equivalent encoder output
signal B high (RS422)
Equivalent encoder
output Z-
Equivalent encoder output
index low (RS422)
Equivalent encoder
output Z+
Equivalent encoder output
index high (RS422)
Differential analog command
input high (DC voltage ±
10V)
Differential analog command
input low (DC voltage ±
10V)
Direction signal high
(RS422), or down counting
signal high
Direction signal low (RS422),
or down counting signal low
Secondary encoder input
signal B high (RS422)
Secondary encoder input
signal B low (RS422)
Pulse signal high
(RS422), or
main encoder signal A high,
or up counting signal high
Secondary encoder input
signal A high (RS422)